V2X 技术提速,铺平高阶自动驾驶发展之路
2024年11月13日 19:06 发布者:eechina
作者:MathWorks随着自动驾驶技术的快速发展,车辆之间的协同通信变得越来越重要。车联网(V2X)技术作为一种新型的车辆通信技术,通过车车(V2V)和车路协同(V2I)等方式,实现了车辆与车辆、车辆与基础设施之间的信息交换,有效提升了道路交通安全性和效率。在 V2X 技术中,基于蜂窝网络的车联网(Cellular-V2X,简称C-V2X)凭借其广域覆盖和低延迟的特点,成为实现车与车、车与路侧基础设施之间通信的首选技术。
V2X 技术加速普及,发展前景广阔
作为智能网联汽车的关键技术,V2X 技术的发展经历了几个关键阶段。

图片引用自:5GAA white paper “C-V2X Use Cases and Service Level Requirements”
V2X 的第一波热潮是在 2018-2020 年,伴随着 3GPP Release 15 和 Release 16 的发布,V2X 技术在市场上开始落地。
自 2022 年宝马宣布未来车型将全面标配 V2X 以来,V2X 技术的关注度和应用有所增加,迎来第二波热潮。5G 的不断演进,尤其是 Release 17 和 Release 18 的发布,为 V2X 应用提供了更高速率、更低时延、更可靠的通信基础,推动了 V2X 技术的快速发展和应用场景的拓展,特别是在交通效率和安全相关的应用方面,如交通信息的收集与共享、紧急电子刹车灯、左转辅助等。
值得一提的是,中国在 V2X 领域的发展相对领先。据统计,2023 年,整个国内新车的5G 标配率为 7.5%,V2X 的装配率仅为 1%。这些量产车辆大规模部署的 V2X 应用,主要包括基本的安全应用(如前向碰撞警告、紧急电子刹车灯、左转辅助等)以及本地危险和交通信息的共享。
近两年来,国家陆续出台了一些 V2X 的利好政策。例如,2023 年 9 月 27 日,中国新车评价规程(C-NCAP)2024 版草案在中国汽车技术研究中心官网发布,首次将 V2X纳入评估范围。2024 版 C-NCAP 的 V2X 部分已被添加到 ADAS 部分,测试项目中对目标车辆(GVT)的描述包括“C-V2X 网络通信能力”。因此,理论上,所有主动安全测试都可以使用 V2X 实现。此外,五大部联合发布的 20 个试点城市开始“车路云一体化”的部署,也将进一步推动 V2X 的上车。
尽管目前 V2X 技术主要提供预警和提醒功能,但随着技术的成熟和政策的支持,V2X 的功能将越来越丰富,并与单车智能的融合更加紧密,逐步参与到决策过程,成为单车智能的“拐杖”。
在技术发展上,V2X 将在今年以后与高精度地图(HD Map)和车对行人(VRU)感知等新技术相结合,到 2026 年以后,预计 C-V2X 将在更复杂和高级的自动驾驶应用中大规模部署,如传感器共享、合作驾驶(Cooperative Maneuvers)以及动态交叉口管理等。
V2X 技术助推高阶自动驾驶
在城市复杂的交通环境中,自动驾驶车辆的摄像头识别虽然可以提供实时信息,但在有遮挡或复杂路况下(例如十字路口)存在盲区,无法确保准确性。相比之下,V2X 通信具有高实时性和不受遮挡影响的优势,能够弥补前者的不足,对于 L3 及以上级别的高等级自动驾驶,V2X 提供的高质量信号至关重要。至于中低端车型,V2X 则可以提供更基础的辅助驾驶功能,如导航和碰撞预警,从而提升驾驶安全性。
因而,V2X 通信技术已成为解决单车传感器能见范围局限的重要手段,也是实现高度自动驾驶的重要一环。
不过在现有的智能驾驶软件上增加 V2X 功能时,开发者面临着在场景搭建、红绿灯设置和无法从高精地图自动生成 V2X 消息的局限性。这是由于现有的自动驾驶测试场景仿真工具缺少某些关键功能,只能依赖临时性和不够自动化的解决方案。
随着 V2X 技术不断发展,车、路、云三者之间的紧密协同将变得尤为重要。单凭任何一方都难以独立完成 V2X 系统的构建,产业界的合作成为推动这一技术落地的关键力量。
正如在 V2X 量产车端应用领域扮演着创新者和先行者的零束科技,正通过 V2X 技术增强自动驾驶车辆的环境感知与决策能力,利用车与车(V2V)、车与基础设施(V2I)、车与网络(V2N)之间的实时数据交换,实现超视距的交通信息获取,从而克服传统传感器在恶劣天气或视线受阻情况下的局限。通过集成 V2X 通信模块,自动驾驶系统能够预测并防范潜在的交通风险,通过车辆间以及车辆与交通信号系统间的协同决策,优化行车策略,提高道路安全性与交通效率。
利用 V2X 通信优化城市交叉路口碰撞预警
在增强和加速自动驾驶的进程中,受益于 MathWorks 公司的产品和技术服务支持,零束科技高效实现了针对交叉路口的车辆碰撞预警仿真场景的开发。交叉路口是非常典型的智驾盲区场景,可以很好的发挥 V2X 补盲的功能。零束科技通过使用 MathWorks 的 Simulink 试验台模型与 RoadRunner 场景进行仿真,能够模拟实际交通环境中包含 V2X 系统的复杂情况,测试自动驾驶系统中的各个模块,确保功能的充分验证,减少实际应用中的风险。
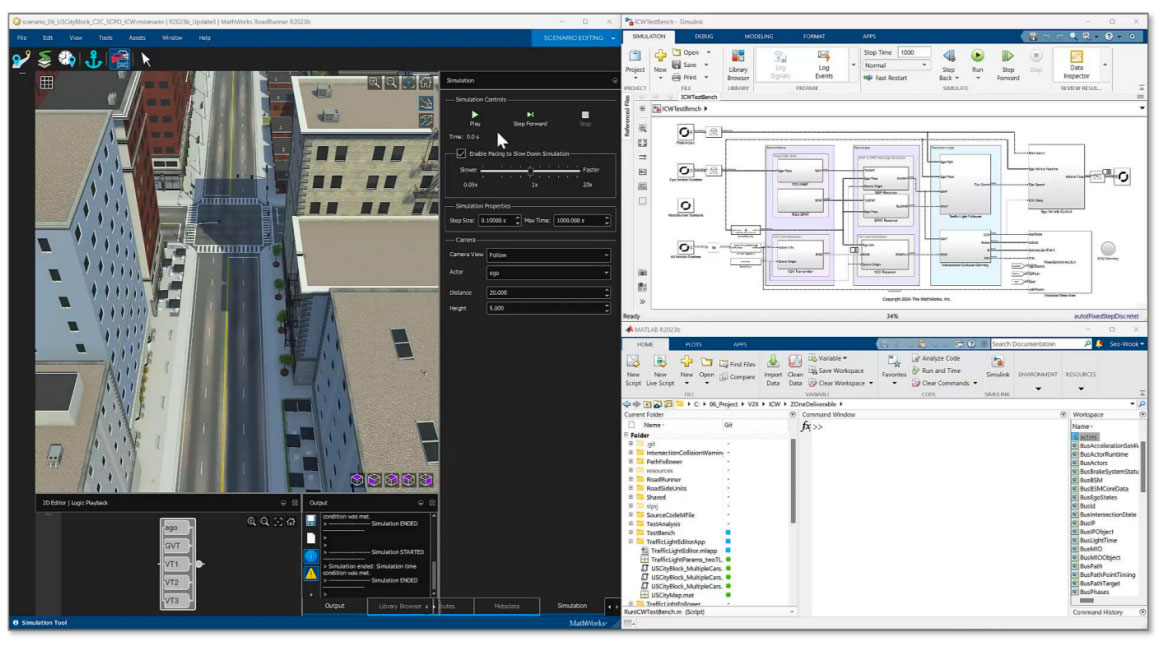
图片引用自:MathWorks 2024 中国汽车年会,使用 Simulink 试验台和 RoadRunner Scenario 联合仿真交叉路口预警
RoadRunner 作为 V2X 功能在自动驾驶融合场景中的设计、测试和仿真工具,主要用于创建静态和动态场景,如复杂路网、交通信号、车辆和行人等其他环境元素,RoadRunner 本身能够支持不同高精度地图的导入导出。在这一基础之上,MathWorks 与零束科技基于 V2X 标准的智能网联汽车应用,开发了多项新功能,包括基于高清地图信息的自动化处理、交通灯时序信号的配置和交互等。RoadRunner 提供了一个有用的工具,可以从高清地图自动生成 MAP 和 SPaT 消息,从而大幅提升了 SIL(软件在环)测试的效率。安装了 RoadRunner SIL 测试环境的工控机连接上与测试仪表后,可以实现自动化的 HIL 测试。
在这个系统中,Simulink 负责实现智能驾驶功能的计算和控制,并根据输入产生输出结果。Simulink 和 RoadRunner 之间通过信息交换,使得仿真环境能够与实际算法交互,模拟出车辆的动态行为和决策过程。

图片引用自:MathWorks 2024 中国汽车年会
此外,双方还重点开发了与交通信号灯相关的功能,特别是针对 V2X 通信如何与交通灯的时序信号进行交互。通过这些开发,车辆可以提前获知前方路口的红绿灯状态,从而及时采取相应措施。
零束科技与 MathWorks 的合作带来了以下几方面的技术创新和行业优点:
- 仿真与测试的精确性:使用 MATLAB 和 Simulink 进行 V2X 平台的开发,使得模拟和测试过程更加精准。
- 高效的功能开发:RoadRunner 提供了高精度地图信息的提取和处理功能,支持 V2X 应用中的地图消息自动化生成。这种仿真能力帮助开发团队在虚拟环境中测试 V2X 系统的性能和安全性,从而提高了开发效率,减少了物理测试所需的时间和成本。
- 降低成本和提高安全性:V2X 技术通过实时通信增强了车辆与基础设施之间的互动,提供了更高的安全保障。例如,通过 V2X 技术,车辆可以提前获得路口信号的状态,从而优化决策,减少事故发生的概率。同时,V2X 技术的集成使得在低成本硬件上也能实现有效的辅助驾驶功能,使得高阶功能的普及变得更为经济。
- 促进技术迭代和应用普及:MATLAB 和 Simulink 等仿真和建模工具帮助开发团队更好地理解和实现复杂的 V2X 功能,如交通灯控制和车与车之间的即时通信,这些都提升了整个行业的技术水平。
结语
MathWorks 与零束科技的合作,充分发挥了各自的优势,共同打造了一个高效、可靠的交叉路口碰撞预测的 V2X 仿真平台。该平台不仅为 V2X 技术的发展和实施提供了重要支持,而且为智能驾驶的普及奠定了坚实的基础。展望未来,随着硬件成本的下降和政策支持的增强,V2X 技术的市场渗透率将在 2025 年及之后的三到五年内显著提高,让我们拭目以待。