eVTOL 飞机中的高可靠性辅助电源系统架构
2024年10月08日 18:03 发布者:eechina
作者:GAIA用于货运和客运的电动垂直起降 (eVTOL) 飞机是目前司空见惯的无人机技术的自然发展。然而,这些新应用的可靠性是首要考虑因素,其核心是在故障条件下维持飞行控制和导航电子设备的电源。在本文中,我们将介绍一些辅助直流电源架构、它们的特性以及高可靠性和可用性的实际实现。
科幻电影展现了未来的景象,飞行出租车嗡嗡作响,英雄飞行员躲避摩天大楼和其他飞机。现在,这将成为现实,至少以不那么疯狂的方式,著名的 2023 年巴黎航空展上展示了潜在空中出租车的真实飞行演示机 Volocopter 以及许多其他从小规模开始的模型- 最大的航空航天制造商。尽管电影中的空中出租车通常似乎具有某种反重力驱动装置,但我们可能乘坐的空中出租车将是电动的,这是即将推出的 eVTOL 或电动垂直起降技术的一部分。
当然,自 20 世纪 40 年代起,我们就开始使用直升机作为“出租车”,但它们的燃气涡轮发动机噪音大、污染严重,而且只适合超级富豪。小型电动垂直起降飞机非常安静,可能无排放,德国公司 Lilium 表示,作为出租车,它们最终可能比出租车更便宜,可能是每公里 2-3 美元 。
eVTOL 客机运动显然是从无人机技术发展而来,但在商业实现方面存在很大差异,尤其是载客认证,特别是因为 eVTOL 飞机的目标是实现自主。这是一个新领域,没有明确的型号核准和产品认证途径,尽管欧洲航空安全局 (EASA) 和美国联邦航空局正在解决这个问题,有迹象表明认证可以通过视具体情况而定。从操作上来说,飞机需要在城市环境中飞行才能作为出租车,并且可能需要指定的“垂直起降场”,并考虑到所有明显的安全、基础设施和环境影响。
eVTOL 飞行器必须具有容错能力
尽管需要最小的重量和尺寸,但 eVTOL 飞行器中的控制电子设备必须具有与任何传统飞机相同的防护措施和容错能力,这意味着关键系统的冗余。这些至少是电机和表面控制、导航和通信。所需可靠性的衡量标准是“灾难性故障率”,EASA 给出的值为 10-9 每飞行小时,有时以其倒数表示,即十亿小时的平均故障间隔时间 (MTBF)。这听起来可能非常保守,但当这种飞行器变得普遍时,例如服役 10,000 架,这意味着在 11 年的累计飞行中,不会有超过一架发生灾难性故障,这应该远远超出典型的使用寿命。请注意,它是 期间 这11年,不是11年后 - 假设使用寿命期间故障率恒定。对于单个飞行器来说,这相当于飞行 11 年后的生存概率为 0.99999,这听起来令人放心。但困难在于确定组件的故障率,因为 MIL-HDBK-217F 和 Telcordia SR-332 等计算标准的结果可能存在显着差异。
量化冗余量
无论使用何种计算标准,电动垂直起降飞行器中的电子设备在没有冗余的情况下实际上无法在使用寿命期间实现 10 亿小时的 MTBF。然而,简单的系统复制却能带来巨大的改进。如果故障被修复并且复制系统均以相同的故障率主动上线,则总故障率 λ时间 由给出:
 公式1
公式1这适用于 n 个系统,每个系统的故障率为 λ(每小时),修复率为 μ(每小时),并且飞行器至少需要 k 个系统。
达到故障率 λ时间 共 10 个-9 每飞行一小时,有 2 个冗余系统,因此只需要一个,修复时间为三小时 (μ=1/3),λ 计算为 1.3 x 10-5 故障/小时或 MTBF 为 77kHrs,这是系统的实际数字。
监控至关重要
刚刚计算出的故障率值确实取决于故障的立即检测和及时纠正。对于主动冗余系统,如果系统出现故障时能够无缝切换,系统会有效地恢复到可靠性较低的系统,因此警报必须立即记录故障。但一个问题是检测“软”故障,其中一台计算机说,只是向冗余对中的另一台计算机发出不同的命令。如果一个人说“鼻子朝上”,另一个说“鼻子朝下”,哪一个是正确的?因此,冗余集中可能需要至少三个,以便可以对输出进行“投票”。
虽然只有一个主牵引电池是现实的,但由 DC-DC 转换器产生的辅助电源轨及其固有的高内应力水平和温度也应该被复制以实现冗余。 必须采取预防措施,确保一个失败不会导致另一个失败。不过,监控更加简单,因为输出电压通常是预先确定的且不变。
配置冗余辅助电源轨
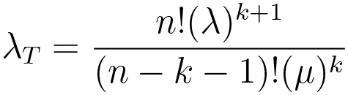
配置冗余辅助电源轨时有一些选择。例如,该布置可以是“在线”的,两个 DC-DC 连续运行,共享电源,并通过隔离二极管将输出门控在一起(图1)。该布置的优点是可以连续监控两个单元的运行状况,从而确保在单次故障后继续发挥功能。监控还必须是独立的,任何均流控制都不得引入单点故障。门控二极管或有时 MOSFET 也必须仔细选择并包含在监控中,例如,短路二极管可能允许“正常”功能,但如果其驱动 DC-DC 因输出本身短路而出现故障,则门控电源轨将无法正常工作。会被拖下去。每个 DC-DC 必须能够提供满负载和任何瞬变,这意味着在正常运行中它们将在低应力下运行,从而提高可靠性。
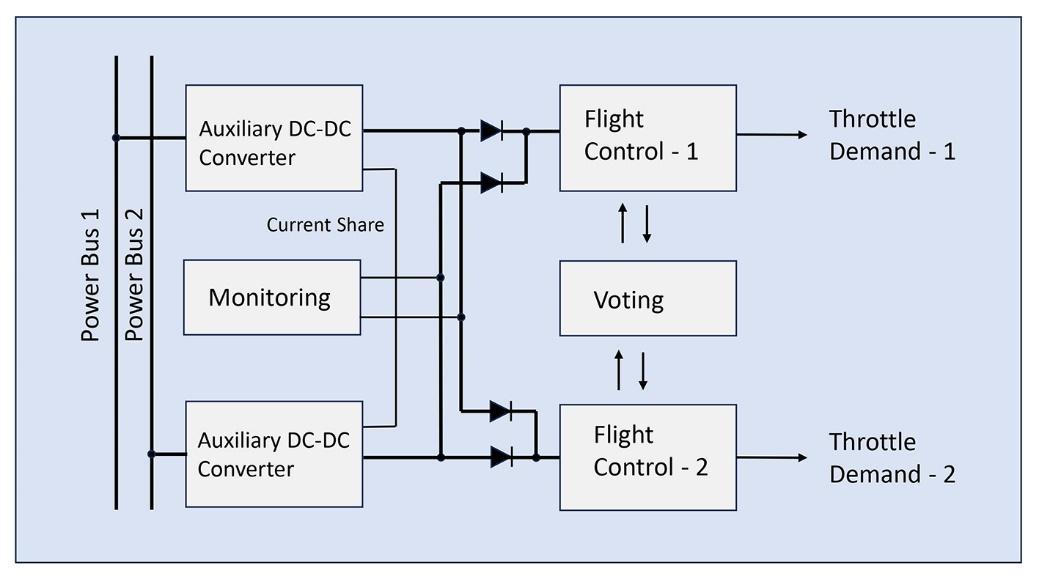
图 1:“在线”布置中的冗余辅助 DC-DC 转换器
如果认为一个 DC-DC 故障会禁用整个飞行控制通道,则图 1 中的系统可以在没有选通二极管和电源监控的情况下运行。这是否能带来系统可靠性的整体优势将取决于 DC-DC 及其负载的实际故障率。这是主观的,但飞行员可能宁愿让两台飞行控制计算机完全运行,而其中一台 DC-DC 发生故障,即使这意味着包含一些无压力的监控和电源共享组件。
离线备份是一种选择
另一种替代方案是离线布置,其中一个 DC-DC 关闭或空闲,并且在主 DC-DC 发生故障时物理地接通(图2)。这可能是一种更简单的布置,无需选通和均流所需的组件。然而,主 DC-DC 提供满载,并且比在线布置承受的压力更高,从而增加了故障率。由于离线 DC-DC 在正常运行中不会“耗尽”其任何使用寿命,因此系统可靠性的提高抵消了这一影响。在线或离线配置能否全面提高系统可靠性将取决于应用细节。使用未通电的备用设备进行离线操作的一个缺点是,您必须相信在紧急情况下需要时它会通电。为了确保这一点,需要定期切换到第二个 DC-DC,并且可能需要定期交换初级和次级 DC-DC,以均衡其剩余寿命。任何反应延迟也可能导致输出电压下降。这可能需要额外的保持措施,例如大型并联电容器,其本身将显着增加故障率计算。也许最大的问题是任何转换开关都是单点故障――如果是机械的,它自然会具有很高的固有故障率。如果是电子的,则会带来损耗,需要仔细设计才能实现极低的故障率。
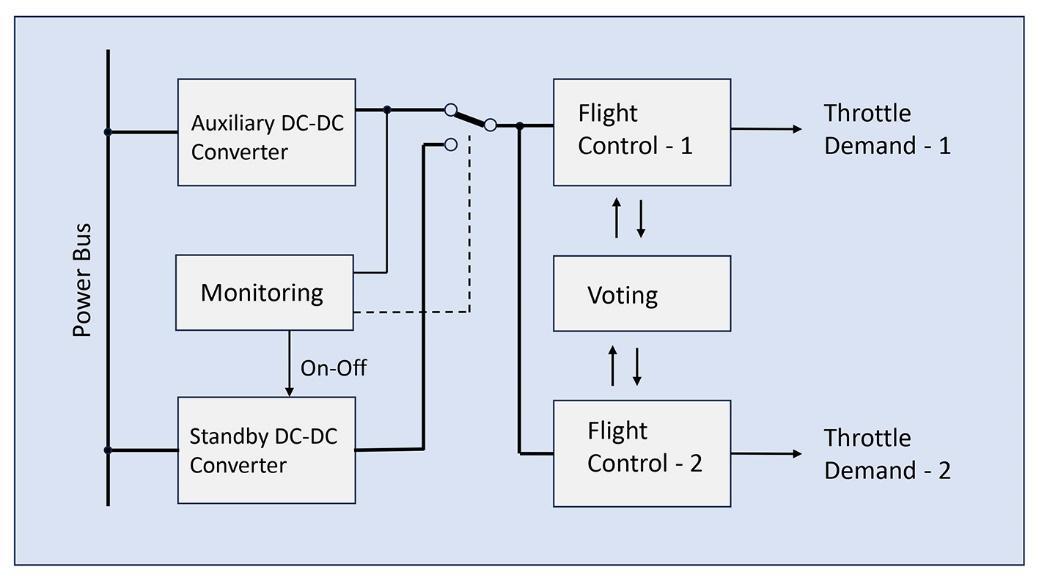
图 2:“离线”布置中的冗余 DC-DC
eVTOL 辅助电源轨发电的实际实施
转子的主电池将处于相对较高的电压,类似于电动汽车,以在高功率水平下保持电流可控。这意味着中间总线电压可能是 24V 或 28VDC,由门控冗余的高功率 DC-DC 转换器生成。该电压可能用于辅助电源系统,例如照明、执行器和小型电机,因此噪音可能相对较大,并且可能适用航空电子/军事电源质量标准,例如 MIL 标准 1275、704、461 和 DO-160。更多的转换器(可能具有隔离功能)将产生更低的清洁电压,以便在电路板周围分配。典型的系统可能看起来像 图3。
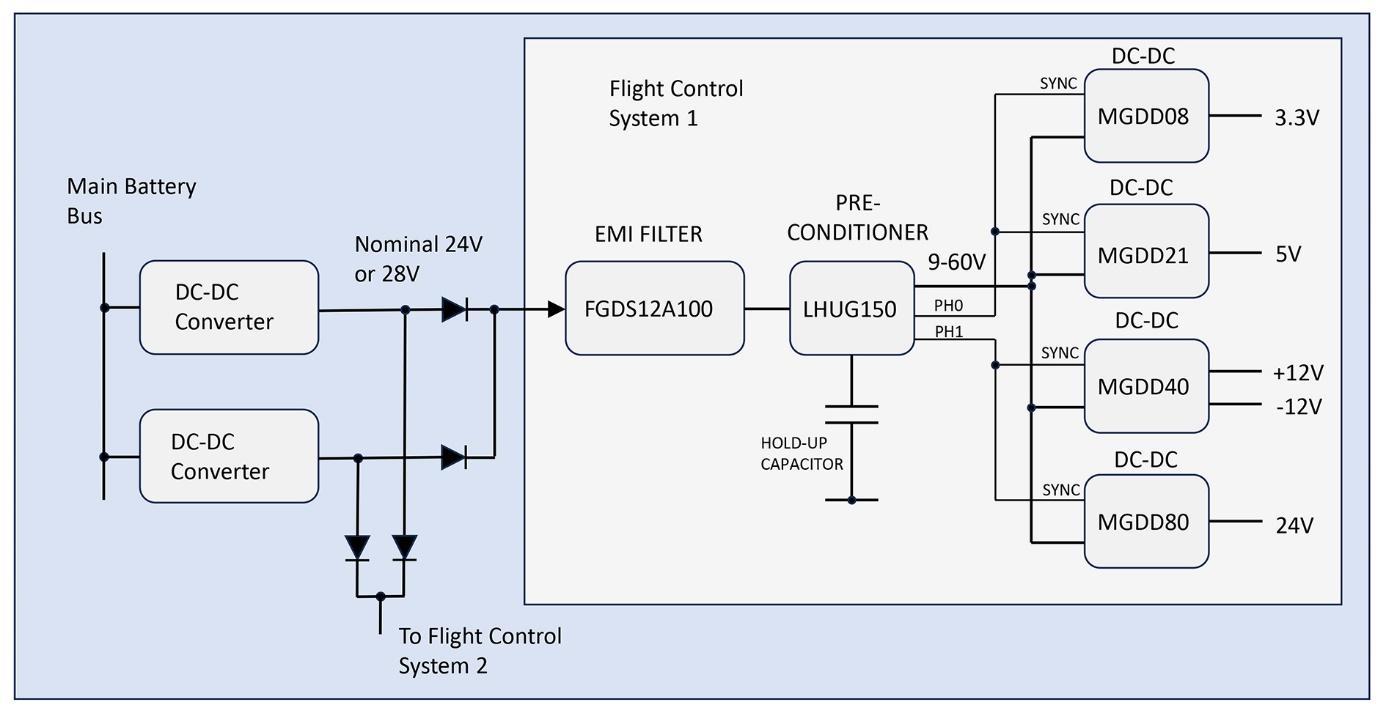
图 3:eVTOL 应用中的配电系统概要
这里,Gaia 转换器 的单片 EMI 滤波器可衰减 24/28VDC 总线上双向的快速瞬变和噪声,而 LHUG 系列 Gaia 的预调节器模块可根据电能质量标准处理较慢的浪涌和骤降。它还包括反极性保护、浪涌控制和软启动。另一个功能是有源保持模式,在正常操作中,外部电容器被充电到高电压,而与输入无关。这是在功率下降后切换的,以相对较小的电容值提供延长的保持时间。
所示的下游 DC-DC 来自 Gaia,在本例中具有高达 80W 的各种额定值,并且可以相互同步并与预调节器模块同步。两个同步相位可最大限度地减少输入纹波电流和产生的噪声。所有部件均具有远程感应、电压微调、开关功能以及安全保护功能,包括输出过压和过流、过温和输入欠压。所述 Gaia 的 DC-DC 为航空电子级、封装、PCB 安装,额定温度高达 105°C 以适应环境,并提供贴壳冷却选项。
结论
由于 eVTOL 市场的标准和配置仍不确定,使用符合航空电子标准并通过适当监控进行冗余配置的现成 DC-DC 转换器有助于加快上市速度,同时最大限度地降低开发风险。具有良好记录的 Gaia 等零件也将是实现所需质量和可靠性水平的安全方法。
参考
https://www.volocopter.com/en
https://lilium.com/Lilium
Rome Laboratory Reliability Engineer’s toolkit. April 1993
www.gaia-converter.com