评估协作机器人安全性时有哪些重要考虑因素?
2024年04月17日 14:53 发布者:eechina
来源:DigiKey作者:Jeff Shepard
协作机器人 (Cobot) 设计用于与人类协同工作,并为工业 4.0 工厂中的灵活生产提供支持。与传统工业机器人相比,协作机器人更简单、更易设置,而且不需要安全隔离的工作空间。由于协作机器人设计用于与人类协同工作,因此其构造与其他工业机器人不同,包括碰撞检测系统、力反馈、弹性执行器和低惯性伺服电机等功能。
协作机器人在设计上有所不同,因此有专门的安全标准。国际标准化组织技术规范 (ISO/TS) 15066 规定了工业协作机器人及其工作环境的安全要求。该规范补充了 ISO 10218-1 和 ISO 10218-2 中有关协作机器人操作的要求和指导。
本文简要回顾了 ISO/TS 15066 的要求,以及这些要求如何与 ISO 10218-1 和 10218-2 相互补充。然后介绍了协作的复杂性,其中包括如何定义协作工作空间。还探讨了与机器人安全相关的各种因素,例如协作机器人内置的安全功能、需要哪些外部安全功能,以及接近传感器、光幕和安全接触垫等典型设备。最后,简要回顾了与协作机器人安全有关的一些特定应用。
工业机器人和协作机器人有多项重要安全标准。ISO/TS 15066 详细规定了工业协作机器人系统和工作环境的安全要求,是对 ISO 10218 系列等旧标准中的有限要求的补充和完善。ISO 10218-1 侧重于通用机器人和机器人设备,而 ISO 10218-2 则侧重于机器人系统和集成。美国国家标准学会/机器人工业协会 (ANSI/RIA) R15.06 是 ISO 10218-1 和 ISO 10218-2 的国家级版本。
协作的复杂性
在详细了解协作机器人的安全性之前,对协作进行定义会有所帮助。机器人协作非常复杂,包括三个要素:
・ 协作机器人,根据 ANSI/RIA R15.06,协作机器人是一种“设计用于在确定的协作工作空间内与人直接交互的机器人”。
・ 协作操作,根据 ISO/TS 15066,协作操作是指“专门设计的机器人系统与操作员在协作工作空间中工作的状态”。
・ 最后是协作工作空间,根据 ANSI/RIA R15.06,协作工作空间是指“安全防护空间内机器人与人可在生产活动中同时执行任务的工作空间”。
这就涉及到“安全防护空间内”的协作工作空间的定义问题。除了协作机器人中包括的标准安全功能外,安全防护空间还设有一层额外的安全防护。
集成到协作机器人中的常见保护功能包括基于每个关节处的扭矩测量值的接触检测系统,该系统可监测意外冲击、障碍物或过大的力或扭矩。为了能够在断电状态下移动机械臂,还应该有自动制动系统和手动制动释放装置。
协作机器人与人的意外接触尤其令人担忧。标准规定,应防止机器人接触人头部的任何地方。此外,标准还将人体分成 29 个特定区域,并详细说明了以下两种接触方式的限制:
・ 瞬时接触,指协作机器人撞到人的动态移动事件。限制基于位置、惯性和相对速度。
・ 准静态接触,在身体部位卡在协作机器人和某个表面之间时发生。限制基于与挤压和夹紧效应相关的压力和力。
该规范提供的是基于应用方面考虑的指导方针,而不是绝对限制。规范还指出,指导方针是为了提供信息,只反映了当前的最佳实践,因为人与机器人之间的协作是一个新领域,还需要进行进一步研究。
协作的连续性
没有单一的协作应用。人和机器人可以通过一种连续的方式进行交互和协作。协作应用的范围很广,涉及共存(当人进入协作工作空间时,机器人停止工作)和交互活动(人接触正在工作的协作机器人)(图 1)。

图 1:人机协作包括多种交互等级。(图片来源:SICK)
为了确定个别协作应用的安全需求,需要进行风险评估。风险评估包括识别、评估和减轻与应用相关的危害和风险。ISO 10218 列出了在各种情况下适用的一系列安全功能,但没有明确的要求。ISO/TS 15066 提供了与协作机器人风险评估相关的更多细节。在每种情况下,风险评估的目标都是为了确定确保协作应用安全实现所需的外部安全装置和系统。
如需深入了解风险评估和机器人,请参阅文章“安全高效地将 AMR 集成到工业 4.0 设施中以实现最大效益”。
保护和效率
虽然协作机器人是为了安全操作而设计,但额外的保护层可以提高协作应用的效率。在没有额外安全措施的情况下,当人进入协作工作空间时,ISO/TS 15066 规定每个轴的最大速度为 0.25 m/s。对于大部分协作机器人而言,这个速度非常慢。
例如,Schneider Electric 的 LXMRL12S0000 Lexium 协作机器人的最大有效载荷为 12 kg,工作半径(工作范围)为 1327 mm,定位精度为 ±0.03 mm,工具端的最大速度为 3 m/s,是 ISO/TS 15066 规定的人处于协作工作空间时的最大允许速度的 12 倍(图 2)。

图 2:这款协作机器人的速度是 ISO/TS 15066 规定的人处于协作工作空间时的最大允许速度的 12 倍。(图片来源:Schneider Electric)
在许多应用中,协作机器人可能会长时间单独工作。因此,如果能感测协作工作空间中是否有人,就可以在无人时以更快的速度工作,提高效率。感测人员存在的常见装置包括安全扫描仪、光幕和安全接触地垫。每种装置都有各自的优势,因此这些装置经常组合使用。
安全扫描仪
安全扫描仪用于监控指定区域,以检测人员的存在。这些装置可以确定人的距离,并在有效安全区之外设置各种警戒区。
Omron 的型号 OS32C-SP1-4M 是专为与协作机器人配合使用而设计的安全激光扫描仪的典型范例。其安全半径可达 4 米,并且支持在长达 15 米的范围内设置多个警戒区。该扫描仪包括 70 套标准的安全区和警戒区组合,以支持复杂的协作工作空间。此外,最小物体分辨率可设置为 30、40、50 或 70 mm,响应时间范围为 80 ms 至 680 ms,进一步提高了应用灵活性(图 3)。

图 3:这款安全扫描仪的安全半径可达 4 米,并且支持在长达 15 米范围内设置多个警戒区。(图片来源:DigiKey)
光幕
光幕可检测人的存在,并且还可设计用于检测各种尺寸的物体,例如手指或手。与安全扫描仪不同,光幕不能测量距离。光幕会在线性发射器和接收器阵列之间发送一连串光束,当物体使一条或多条光束中断时,就可以感应到。
如果按安全等级划分,光幕主要有两类:2 类和 4 类。它们的外观相似,但设计用于提供不同程度的安全性。4 类可监控定义协作工作空间的安全防护空间。2 类光幕专为低风险应用而设计。
光幕提供周边防护,并有多种分辨率可供选择,如 14 mm(手指检测)和 24 mm(手检测)。Banner Engineering 的型号 SLC4P24-160P44 是一款 4 类光幕套件,配备发射器和接收器阵列,分辨率为 24 mm,用于保护人和协作机器人等机器(图 4)。发射器有一排同步调制红外发光二极管。接收器有一排对应的同步光电探测器。发射器的射程为 2 米,光幕的安装长度为 160 mm 至 320 mm(以 80 mm 为增量)。
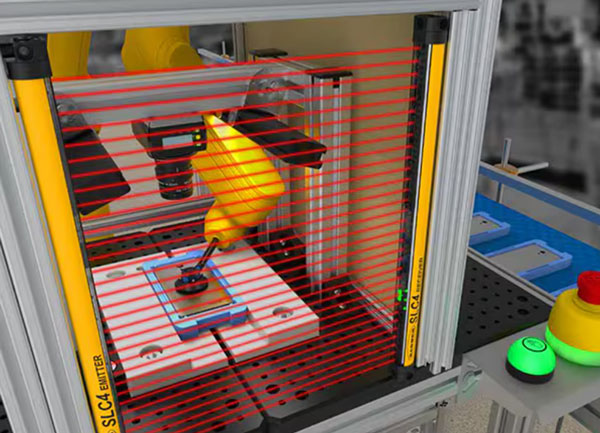
图 4:这款 4 类光幕的分辨率为 24 mm。(图片来源:Banner Engineering)
安全激光扫描仪和光幕为提高协作工作空间的安全性提供了非接触式手段。但是,它们难以用于光学条件苛刻的环境,例如具有强反射表面的区域,这些区域会产生不必要的光干扰,而且这些装置可能会因油脂泄漏、灰尘过多或湿度过大而触发。
为了减轻某些类型的干扰,这些光学传感器还会加入灵敏度调节功能。灵敏度调节功能可能会增加响应时间,并导致其他方面的性能下降。另一种解决方案是将安全接触垫和光学传感装置结合使用。
安全接触垫
安全接触垫有两块导电板,中间由光栅化绝缘层隔开,可单独使用,也可与其他类型的传感器结合使用。如果有人踩到垫子,上面的导电板就会被压下并接触到下面的导电板,从而触发警报信号(图 5)。接触垫的外部是一种聚氨酯材料,这种材料防滑、防水、防尘且防油。ASO Safety Solutions 的 SENTIR 接触垫型号 1602-5533 最多可将 10 个接触垫串联到一个监控装置上,最大覆盖面积为 10 m2。
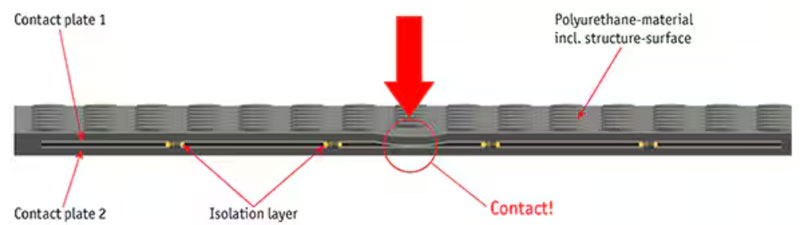
图 5:有人踩在安全垫上时,其顶部和底部导电层接触,触发警报信号。(图片来源:ASO Safety Solutions)
安全在于细节
保证安全没有单一的方法。每种协作应用都有所相同,需要根据其独有的特性和需求进行处理。一个关键因素是:应用在协作的连续系统中处于什么位置(见图 1)?协作机器人与人的交互越密切,需要的安全防护也就越多。
还有更多细节需要考虑。其中包括:
・ 每个位置都需要进行详细的风险评估,以确定协作机器人是否已从一个工作站移至另一个工作站。即使看似相同,微小的差异也会影响安全。
・ 如果协作工作空间中有其他机器,是否需要将它们与协作机器人的关闭系统或安全减速系统相连?
・ 本文重点关注安全相关的硬件,但对于日益普遍的联网系统,网络安全是防止协作机器人操作或安全系统受到干扰的重要考虑因素。
总结
协作机器人安全性非常复杂。首先要确定安全防护空间内的协作工作空间,然后还要对协作操作进行风险评估。ISO/TS 15066 和 ISO 10218 系列等标准非常重要,它们提供了建议和指导。协作机器人必须具备基本的安全功能,如碰撞检测系统、力反馈、弹性执行器和低惯性伺服电机。根据协作应用的具体情况,可能还需要额外的安全装置,例如接近传感器、光幕和安全接触垫。