如何使用触感器件提高人机界面的感知能力
2022年09月14日 10:50 发布者:eechina
来源:Digi-Key作者:Jeff Shepard
对更高效人机界面 (HMI) 和更高感知能力的需求,正在推动触感器件在工业 4.0 应用、汽车、医疗和现场急救系统、物联网 (IoT) 设备、可穿戴设备及其他消费电子设备中的采用。例如,触感器件可以在基于 VR(虚拟现实)或 AR(增强现实)的医疗培训和患者康复系统中提供反馈,或者在方向盘上提供增强的警报,告知司机潜在的不安全状况。触感器件还与其他 HMI 技术(如声音)结合使用,以提供更具沉浸式效果和更真实的感官界面。
设计人员在使用触感器件时会面临一些挑战,包括:选择正确的触感技术(偏心旋转质量 (ERM) 或线性谐振致动器 (LRA)),正确地将其集成到系统中以达到所需的反馈水平,驱动触感器件,以及了解如何测试触感器件的振动、噪声性能和可靠性。
本文首先简要回顾触感反馈可以为几种应用场景带来的好处,然后介绍触感技术选项以及来自 PUI Audio 的真实触感器件示例。文中讨论了如何将触感器件集成到系统中,包括一个触感驱动器 IC 的示例,最后详细介绍了振动和噪声性能的测试方法。
多感官界面
触感器件正在越来越多地与视觉和听觉反馈结合使用,以创建多感官环境和增强的人机交互效果。触感界面可能包括衣服、手套、触摸屏和其他物体,如移动设备和电脑鼠标。
多感官交互尤其适合利用非视觉 HMI 元素(如触感或声音)让用户保持对手头任务的关注,例如远程控制机器、手术工具或驾驶汽车。将触感器件集成到 HMI 还能支持与虚拟环境或远程操控的远程系统实现增强的手动交互。为了获得将触感器件集成到 HMI 的最大好处,设计人员需要了解触感技术的性能权衡。
触感器件技术
最常见的触感技术包括 ERM 和 LRA。ERM 使用电机轴上的偏心质量来制造失衡并产生振动。ERM 器件使用相对简单的直流 (DC) 电压驱动。ERM 使用直流电,结合相对简单的机械设计,具有若干权衡:
优势:
· 驱动简单
· 成本低
· 外形尺寸灵活
· 对某些设计而言,系统集成更简单
劣势:
· 能耗高
· 反应速度慢
· 解决方案的尺寸较大
相反,LRA 器件没有使用偏心质量产生多轴振动,而是利用音圈、圆形磁铁和弹簧,以直线运动的方式产生振动。LRA 器件采用交流电 (AC) 驱动器为音圈供电。交流电在音圈中形成可变磁场,致使磁铁上下移动。弹簧将磁铁与器件外壳相连,将振动能量传递到系统。由于 LRA 器件以音圈为基础,不依赖 ERM 中使用的电刷,因而在给定的振动强度下功耗较少。以 180° 相移驱动 LRA 器件可以实现制动,从而加快响应速度。
LRA 器件在相对较窄的谐振频段(通常为 ±2 至 ±5 Hz)内高效运行。由于制造公差、元器件老化、环境条件和安装考量等诸多因素,LRA 器件的确切共振频率可能各有不同,导致驱动电路的设计异常复杂。与 ERM 器件相比,LRA 触感器件给设计人员带来了一系列优势和劣势:
优势:
· 响应速度更快
· 效率更高
· 加速度更快
· 可以制动
· 尺寸可能更小
劣势:
· 共振频率可能变化
· 驱动难度大
· 成本更高
除了操作上的差异外,ERM 和 LRA 器件还提供了多种封装样式。ERM 器件可采用硬币或条形封装,LRA 则采用硬币、棱形(矩形)或桶形封装(图 1)。硬币式 ERM 和 LRA 器件通常直径约 8 mm,厚度约 3 mm。条形 ERM 触感器件的尺寸较大,长约 12 mm,宽约 4 mm。
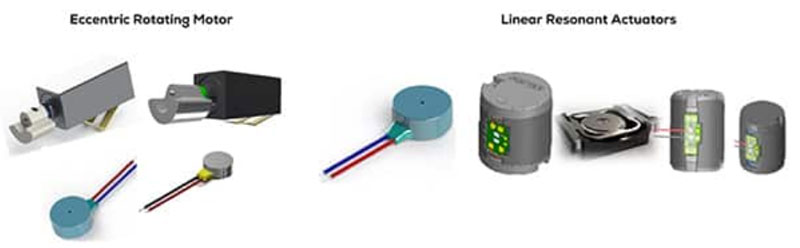
图 1:ERM 提供条形或硬币封装,LRA 则提供硬币、桶形或棱形格式。(图片来源:PUI Audio)
硬币式 ERM 器件
对可穿戴设备这类可以从硬币式 ERM 器件获益的应用而言,设计人员可以使用来自 PUI Audio 的直径 8 mm、厚度 3 mm 的 HD-EM0803-LW20-R。HD-EM0803-LW20-R 的规格包括:
· 额定转速每分钟 12,000 (±3,000) 转 (rpm)
· 端子电阻 38 Ω (±50%)
· 输入电压 3 V 直流
· 额定电流消耗 80 mA
· 工作温度范围 -20 至 +60 °C
对于需要在更具挑战性的热环境中工作的器件,设计人员可以改用 HD-EM1003-LW15-R,其额定工作温度为 -30°C 至 +70°C。它与 HD-EM0803-LW20-R 具有相同的额定转速和尺寸,其端子电阻为 46 Ω (±50%),额定电流消耗为 85 mA。这两种硬币式 ERM 器件都可以使用正、负直流电驱动,以实现顺时针或逆时针转动。它们包括 20 mm 的导线,可实现灵活的电气连接,并产生最大 50 dBA 的声学噪声。
条形 ERM
HD-EM1206-SC-R 长 12.4 mm,宽 3.8 mm。当以 3 V 直流电驱动时,其额定转速为 12,000 (±3,000) rpm,额定工作温度为 -20 至 +60°C,可产生最大 50 dBA 的声学噪声。需要较低声学噪声级的设计可以使用 HD-EM1204-SC-R(图 2)。此型号产生的最大声学噪声仅为 45 dBA。与 HD-EM1206-SC-R 相比,它还具有更高的额定转速 13,000 (±3,000) rpm,以及更宽的工作温度范围 -30°C 至 +70°C。两个器件都具有 30 Ω (±20%) 的较低端子电阻和 90 mA 的额定电流消耗。

图 2:HD-EM1204-SC-R ERM 适用于声学噪声级要求较低的应用。(图片来源:PUI Audio)
LRA 器件
需要更快响应速度、更高能源效率和更强振动的设计可以使用 PUI Audio 直径 8 mm、高 3.2 mm 的 HD-LA0803-LW10-R LRA 器件(图 3)。相较于 ERM 触感器件,LRA 器件的精度更高。例如,ERM 器件的电阻范围为 30 (±20%) 至 46 Ω (±50%),而 HD-LA0803-LW10-R 的电阻规格为 25 Ω (±15%)。HD-LA0803-LW10-R 的功耗约为 180 mW (2 VRMS x 90 mA),而以上讨论的 ERM 器件功耗则为 240 至 270 mW。此 LRA 器件的工作温度范围为 -20 至 +70°C。
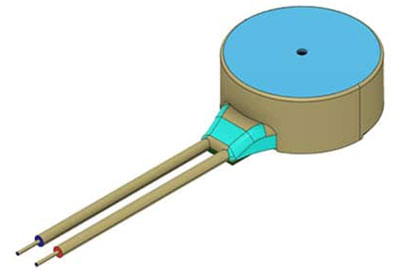
图 3:HD-LA0803-LW10-R LRA 兼具振动强、响应速度快和能源效率高的特点。(图片来源:PUI Audio)
系统集成
使用双面胶带是硬币式触感器件的首选装配方法,可以为系统提供最佳振动耦合。双面胶带器件包括需要通孔连接并以手动方式焊接到电路板的引线。条形、桶形和棱形器件提供两种不同的系统集成样式:双面胶带和弹簧触头。当使用双面胶带时,这些器件包括与硬币式器件一样的手工焊接的引线。使用弹簧触头可以将振动耦合功能与电气连接合二为一。弹簧触头消除了手工焊接的需要,既简化了装配又降低了成本。此外,使用弹簧触头还可以简化现场维修。
驱动触感器件
分立驱动电路可以与 LRA 和 ERM 器件一起使用。虽然使用由分立元器件制成的驱动器可以降低成本,尤其是相对简单的设计,但与驱动器 IC 相比,可能导致解决方案的尺寸更大,上市时间更久。对于需要紧凑型和高性能解决方案的应用,设计人员可以改用 Texas Instruments 的 DRV2605L。DRV2605L 是一个可实现高质量触摸式反馈的完整闭环控制系统,可用于驱动 ERM 和 LRA 器件(图 4)。DRV2605L 可以使用 Immersion 的 TouchSense 2200 软件,该软件拥有 100 多种许可的触感效果,以及音频到振动转换功能。
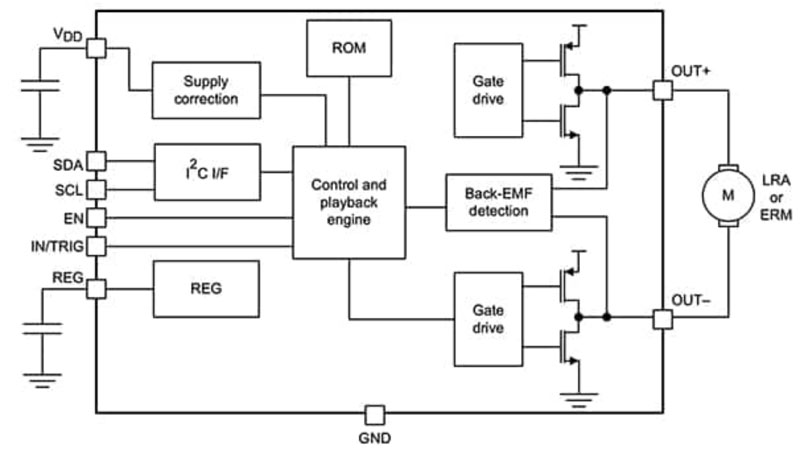
图 4:DRV2605L IC 可以驱动 LRA 或 ERM 触感器件。(图片来源:Texas Instruments)
振动测试
由于触感器件的运行以振动为基础,所以它们的结构必须非常坚固。PUI Audio 规定了用于振动测试的测试夹具,如图 5 所示。该测试由工业级电动振动测试系统实现。它可以针对特定的振动测试进行编程,以模拟各种工况,如正弦振动、随机振动和机械冲击脉冲。
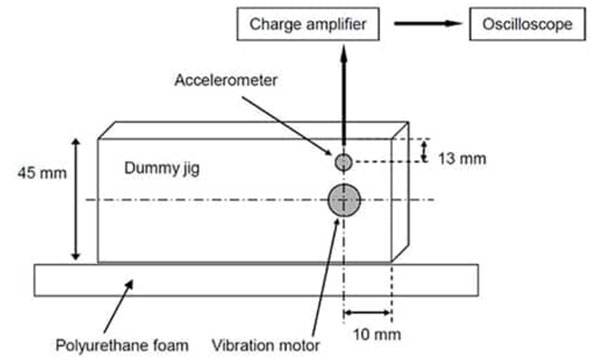
图 5:推荐用于触感器件振动测试的测试夹具。(图片来源:PUI Audio)
PUI Audio 为其触感器件规定了三种振动测试(参见表 1)。器件完成测试并“休息”四个小时后,必须满足额定转速(对于 ERM 器件)或加速度(对于 LRA 型号)规格,以及电阻、额定电流和噪声规格。

表 1:触感器件的振动测试规格。(表格来源:PUI Audio)
除了振动测试外,PUI Audio 还定义了如下所示的冲击测试:
· 加速度:半正弦波 500 g
· 持续时间:2 ms
· 测试/面:3 次/6 个面,共计 18 次冲击
通过/失败的标准与振动测试相同。
测量声学噪声
触感器件产生的声学(机械)噪声级各不相同,触感器件的安装方式在尽可能降低噪声级方面起到关键作用。PUI Audio 建议使用特定的测试设置来测量触感器件的声学噪声,如图 6 所示。测试应在环境噪声为 23 dBA 的屏蔽室内进行。如果同预期的系统安装一样,将器件安装到 75 g 夹具中,这项测试将会告诉设计人员应用中的预期噪声级。
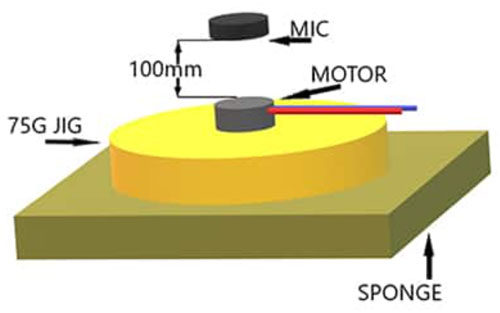
图 6:推荐用于测量触感器件声学噪声的测试夹具。(图片来源:PUI Audio)
结语
通过向用户提供触摸式反馈,触感器件可用来改善 HMI 性能,并帮助创建高性能的多感官环境。但在考虑使用触感器件时,设计人员需要了解 ERM 和 LRA 技术之间的权衡、如何有效地驱动这两种技术,以及如何进行测试,以确保实现所需的系统可靠性和性能水平。如上所示,触感器件及驱动器和测试程序都是现成可用的。