【开源教程12】疯壳・开源编队无人机-串口(视觉数据获取)
2022年08月17日 10:39 发布者:Linda-x
COCOFLY教程――疯壳・无人机・系列串口(视觉数据获取)
图1
一、OPENMV 模组简介
OPENMV 是一个开源、低成本、功能强大的机器视觉模块。以 STM32F767 为核心,集成了 OV7725 摄像头芯片,在小巧的硬件模块上,用 C 语言高效地实现了核心机器视觉算法,提供 Python 编程接口。开发者、电子发烧友以及智能设备开发商都可以用 Python 语言使用 OPENMV 提供的机器视觉功能,为自己的产品和发明增加有特色的竞争力。
OPENMV 上的机器视觉算法包括寻找色块、眼球跟踪、边缘检测、标志跟踪等。可以用来实现非法入侵检测、产品的残次品筛选、跟踪固定的标记物等。使用者仅需要写一些简单的 Python 代码,即可轻松的完成各种机器视觉相关的任务。小巧的设计,使得 OPENMV 可以用到很多创意的产品上。比如,可以给机器人提供周边环境感知能力;给智能车增加视觉巡线功能;甚至,可以给工厂产品线增加残次品筛选功能等。
COCOFLY 上的无人机视觉模组采用的就是 OPENMV,其实物图如下图所示。

图2
其中OPENMV 的Python 代码已经写好提供给用户,如果用户需要修改的话, 也可以修改使用,目前 OPENMV 串口发出的视觉数据的协议框架如下表所示。

表1
其中帧头是固定为两个字节:0xAA、0xAA;功能字为一个字节;长度为数据的长度,也为一个字节;数据位 n 个字节;和校验为一个字节,即帧头开始相加到最后一个字节,保留低 8 位。
视觉模组的接收数据,即模式设置的协议框架如下表所示。

表2
其中帧头是固定为两个字节:0xAA、0xAF;功能字为 0xF1;长度为数据的长度,也为一个字节;Mode,即 OPENMV 的模式设置,为 1 个字节;和校验为一个字节,即帧头开始相加到最后一个字节,保留低 8 位。
该数据的协议用户均可自定义,详情可以看配套的OPENMV 的Python 源码,
OPENMV 的具体使用方式可以查看 OPENMV 官网。
二、串口视觉数据获取实验
串口视觉数据获取实验使用 STM32 的串口 1 即 UART1 与视觉模组相连, 串口 2 即 UART2,通过 USB 转串口模块连接电脑,把串口 1 获取到的视觉数据通过串口 2 传输到电脑端的串口调试助手显示出来。做该实验的时候需要把视觉模组接到 USART1,把光流模组暂时取下,并且把 USB 转串口的线接到光流接
口处。
串口 1 和串口 2 的配置可以参考《串口(基础收发)》和《串口(光流数据获取)》两节,配置代码(通过调用官方库)的思路,如下表所示:
代码思路
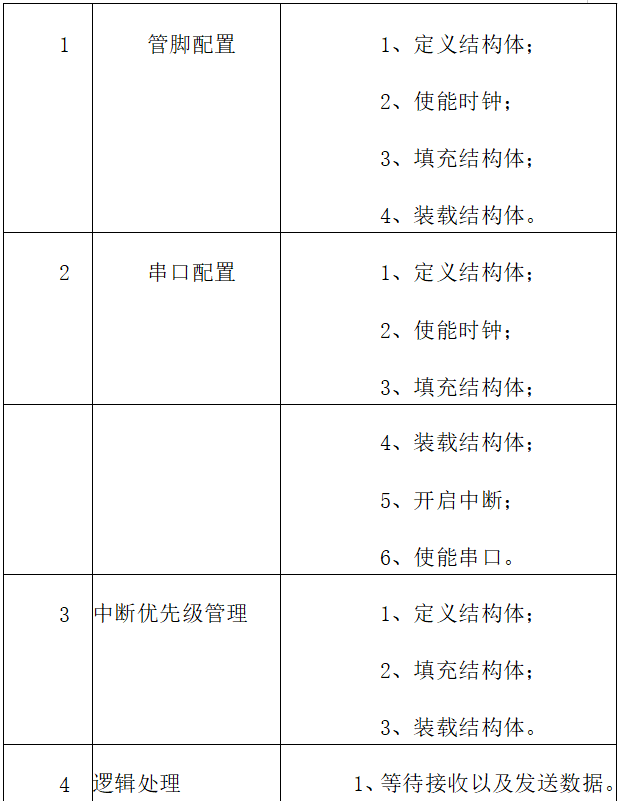
表3
串口 2 初始化代码如下:

图3
这里注意要把串口的发送也配置好,这样才能把数据发送到电脑。
串口 1 接收到视觉模组的数据就转发到串口 2,串口 1 的中断函数代码如下。

图4
设置串口 1 的波特率为 1115200,串口 2 的波特率也设置为 115200,代码如下:
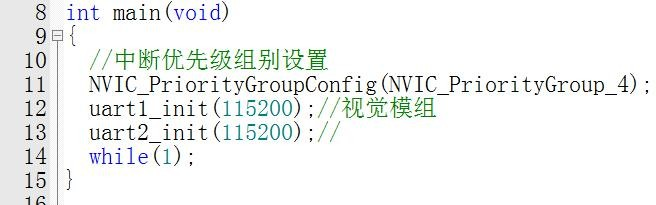
图5
保存、编译、下载代码,确保串口 1 接上了视觉模组,然后再把串口 2 接上
USB 转串口模块,最后接到电脑的 USB 端口,如下图所示:
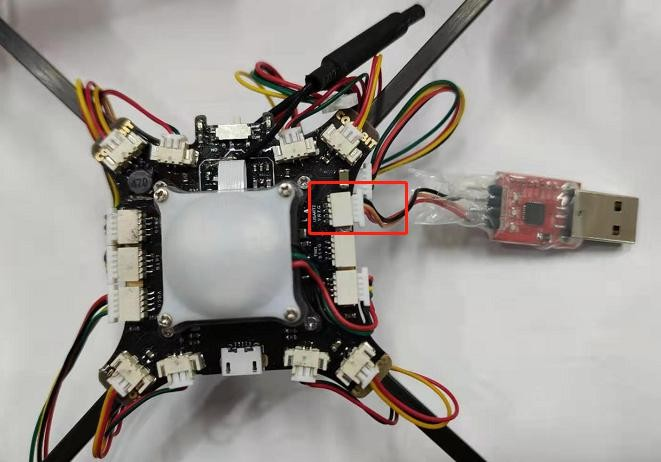
图6
然后在把 USB 转串模块插到电脑的 USB 口,打开电脑端的串口调试助手, 找到对应的 COM 口(前提是安装了 USB 转串口驱动),设置波特率为 115200, 打开,可以看到串口在不断打印视觉模组发送的数据,如下图所示。

图7
更多完整学习资料和对应开源套件,请登陆官网:“疯壳”
如需定制开发,请通过官网“疯壳”网页底部的“联系我们”进行联系
文件下载请点击:259601