现成的电机控制平台:智能控制器如何加速新电机驱动器的开发
2022年04月24日 10:40 发布者:eechina
来源:富昌电子作者:Martin Schiel,EMEA垂直部门经理(嵌入式系统)
当一项电子功能或多或少地通用于大批量产品中时,半导体行业能够协助系统设计人员的工作,并创建现成的实施方案。芯片制造商开发的参考设计构成了许多熟悉产品的硬件的基础,例如PC、固态磁盘、智能手机和电视机等。
现在可以在电机控制领域中观察到这种现象:新型机器人设计数量的激增促使半导体制造商探索通过为小型节能电机提供先进的新参考设计平台来减少客户开发开销、加快产品上市并增强功能的方法。
作为拥有广泛的全球客户基础(包括许多工业OEM)的宽线分销商,富昌电子对适合机器人系统开发人员的半导体产品了如指掌。在公司看来,机器人设备设计人员应该在他们评估的基于半导体的电机开发平台中寻找三个基本要素。
本文介绍了这些要素,并通过参考意法半导体提供的平台说明了它们如何帮助加快系统设计。
电机控制:对半导体厂商越来越有吸引力的市场
电机系统设计人员从半导体供应商提供的快速开发平台中受益的原因是,伺服驱动器和机器人市场有可能出现急剧增长。出现这种增长的原因是工业市场处于最佳状态,在这种情况下,处理器性能和速度的提高可实现日益复杂的操作,从而为机器人提供了一套新的用例,可以支持、模仿、增强或替代人类的能力,尤其是在使用人工智能(AI)进行了增强时。
据国际机器人联合会,在近十年内机器人技术的主要趋势将是:
・ 机器人变得更聪明
数字传感器与智能软件相结合,可以采用直接的教学方法,即所谓的“演示编程”。未来,机器学习工具将使机器人能够通过反复试验或视频演示来学习,然后自动优化其动作。
・ 机器人与人协作
当前,机器人的共享工作区域应用是最常见的:机器人和工人并肩工作,依次完成任务。现在的研发工作集中在使机器人能够实时响应的方法,包括语音、手势和人类动作意图的识别。
・ 机器人迈向数字化
工业机器人是工业4.0浪潮中数字化和网络化生产的核心组件。对于他们而言,无论制造商是谁,能够彼此通信就显得尤为重要。OPC机器人技术规范定义了工业机器人的标准化通用接口,使工业机器人能够连接到工业物联网(IIoT)。
随着这些趋势在未来数月和数年中逐渐显现,我们将看到更多的机器人和更多不同类型的机器人在更多位置执行更多功能。每个机器人至少包含一个电机;带有铰接、关节、笛卡尔或其他类型手臂的机器人通常包含许多电机。因此,对电机和电机控制系统市场快速增长的预测,以及半导体公司对通过提供参考设计平台来帮助电机系统设计人员加速产品开发的兴趣日益增长。
在富昌电子看来,电机控制开发平台的三个重要特性对工业用户最有价值:集成、可配置性和生态系统兼容性。为什么这些特性非常重要?
1. 高水平的芯片集成度
电机控制系统是各功能块的复杂组合。传统上,电机控制板设计包含大量分立组件,这种方法往往会增加BoM成本,使电路板布局更加困难,并提高电路板和组装成本。
这正在推动芯片制造商为电机电路创建更多集成解决方案,将驱动、控制、信号处理和电源管理功能集成到单个器件中。集成提供的好处与多组件系统的缺点相对应:更小、更简单、更经济的集成解决方案可以加速用户的设计实现,同时提供更高的性能,因为集成到单个器件中的功能已经过优化,可以协同工作。
图1:STSPIN32F0A系统级封装,是STSPIN系列集成电机控制器/驱动器的一款产品(图片来源:意法半导体)
意法半导体的STSPIN32系列就是这种朝着电机控制集成解决方案发展的新趋势的一个例子(见图1)。STSPIN32F0A是一个系统级封装(SiP),可为驱动三相无刷直流(BLDC)电机提供集成解决方案。它集成了三个电机驱动功能,这些功能传统上是在三个单独的器件中实现的:
・ 具有完全保护的三重半桥式栅极驱动器,能够驱动电流为600mA(灌电流和拉电流)的功率MOSFET。用于高边驱动的自举二极管嵌入在驱动器内部。
・ 内部DC-DC降压转换器为嵌入式微控制器内核和外部组件提供3.3V电源。内部12V LDO线性稳压器为三重栅极驱动器提供电源电压。
・ 运算放大器可用于信号调节,例如用于放大外部并联电阻上的电流感测信号,或调节来自霍尔位置传感器的信号。
除了驱动器功能之外,STSPIN32F0A SiP还集成了STM32F031微控制器,该微控制器基于Arm® Cortex®-M0处理器内核,时钟频率高达48MHz。该32位MCU提供足够的处理吞吐量,以运行诸如场定向控制(FOC)之类的复杂BLDC控制算法,并提供多个模拟和通信接口以支持电机系统中的外设元件,例如位置传感器和用户控件
2. 易于配置的、运行就绪的电机控制固件
即使可以使用现成的硬件平台,仍然存在重要的开发任务:实施电机控制固件,以确保可以控制电机的速度和位置,使电机高效、安全地运行。
使用现成的固件可以大大减少此开发任务。的确,对于通用电机控制算法(例如FOC和六步控制)有很多IP资源。设计人员面临的问题是,将固件移植到特定硬件主机的难度通常比IP提供商声称的要困难得多。
因此,这是对评估中的任何快速开发平台的第二项测试:它是否提供全面的电机控制固件?意法半导体的固件套件在这方面表现出色:意法半导体在STSPIN32平台上提供了多种算法,这意味着机器人系统开发人员可以在单个主机上试验不同的电机控制系统。这使设计人员可以灵活地构建两个概念验证,其中一个实现具有定位功能的FOC,另一个实现六步控制和更适合于预期应用的测试。STSPIN32平台还可以帮助OEM在单个硬件平台上构建针对不同应用的、具有不同功能的产品系列。

图2:EVALKIT-ROBOT-1套件具有一个用于控制Maxon EC-i 40电机的STSPIN32F0A SiP(图片来源:意法半导体)
3. 集成到更广泛的应用软件开发平台中
通过满足测试1)和2),电机控制系统开发人员已经选到了专用的电机控制硬件平台,并带有控制所选电机类型所需的固件。
要考虑的最后一个重要因素是将电机集成到机器人系统中的方法。这意味着需要考虑更广泛的发展生态系统的问题。
在任何机器人系统中,电机都只是应用中的一个要素,尽管它很重要。如果工程师需要在多个开发环境中学习并提高生产力,它能够节省开发人员的时间和精力。因此,如果电机的开发可以在与其他功能的开发相同的环境中进行,则可以提高开发人员的效率。
对于STSPIN32系列,可以在STM32Cube(用于配置STM32系列中的任何MCU的开发环境)中配置和实现电机控制固件。ST MCU的用户已经在STM32Cube中花费了大部分开发时间。ST电机控制固件开发软件X-CUBE-MCSDK只是STM32Cube中的一个附加模块。因此,采用STSPIN32系列进行电机控制的STM32用户能够在与其系统开发的所有其他元件所处的相同环境中工作,并使用相同的控件和功能。
现成的硬件参考设计
如我们所见,机器人市场的增长促使半导体制造商加紧步伐,以提供现成的、用于驱动和控制机器人手臂的电机控制系统。意法半导体在这一领域的投资特别具有吸引力,因为它提供了高度集成的运动控制SiP、各种电机控制算法以及用于开发整个应用的高度开发的工具套件。意法半导体正继续扩展该系列:提供250V级的STSPIN32F025x和600V级STSPIN32F060x器件,并计划发布具有更高处理能力的新器件。
对于STSPIN32F0A用户,通过使用意法半导体创建的基于Maxon EC-i 40电机的参考设计系统可以进一步缩短开发时间。该参考设计称为EVALKIT-ROBOT-1,在一块仅40mm x 40mm的单板上集成了一个STSPIN32F0A器件、一个基于ST功率MOSFET的功率级、霍尔传感器、一个Maxon ENX 16 EASY 1024脉冲增量编码器,以及外设组件。
其模拟电路实现了逆变器级驱动、电流检测和过流保护,MCU通过闭环位置检测执行FOC。该硬件随附了用于BLDC电机中FOC位置控制的即用型固件。
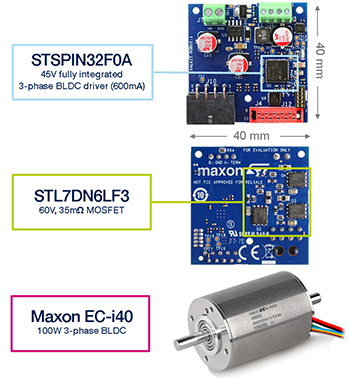
图3:EVALKIT-ROBOT-1电机开发平台的主要技术规格(图片来源:意法半导体)
该系统实现了非常高的转矩密度和非常低的齿槽转矩,并且以其可靠、强大且精确的位置和速度控制而著称。它也可以用于其他工业伺服电机控制应用中。
富昌电子可提供EVALKIT-ROBOT-1套件,并可通过其位于德国慕尼黑的卓越工程中心为实施电机控制系统提供帮助和指导。