���ʹ��LTspice����LED�������IJ���ͼ
2021��12��09�� 15:16 �����ߣ�eechina
How to Use LTspice to Produce Bode Plots for LED Drivers���ߣ�ADI ��˾ Ӧ���ܼ� Keith Szolusha �� Ӧ�ù���ʦ Brandon Nghe
ժҪ
�ʵ��Ŀ��ƻ�·��λ���������Ӧ��ӵ�У�����ģ��豸����Ӧ����Ĺ���ר�ҽ��С����ȱ������һ����������û�У�������һ��ѡ��
���
�ջ��������λͼ������ȷ�����ص��������ƻ�·�ȶ��Եij��ù��ߡ���ȷ����������λ��������Ϥ����������ǡ����������Ͽ����ƻ�·��ע���������Լ�����һ��Ƶ�ʷ�Χ�ڵ��������λ����ͼ1�������ֲ������ƻ�·����������Ӧ����LED��������
LED���������ƻ�·��λ�����������Ҫ����һ�ֲ�ͬ�ķ�������ͼ1�������ӵ��͵ĵ����ѹ·����GND��ѹ������ע��Ͳ������ƫ�������������£�̨ʽ���ƻ�·��λ����������DZ�֤�ȶ��Ե���ѷ�����������ÿ������ʦ����������豸�;���ḻ�Ĺ���Ӧ�ó����ŶӼӳ֡�����ʦ�Ǹ���ô���أ�
һ��ѡ���ǹ���LED���������鿴��˲̬����Ӧ��˲̬��Ӧ�۲���ҪӦ�ð��������̨ʽ�豸��˲̬�����Ľ��ȱ������ͼ����Ƶ�ʵ��������λ���ݡ��������ڱ�֤�ȶ��ԣ�Ҳ����Ϊһ����ƻ�·�ȶ��Ժ��ٶȵ�ָʾ����
���ź�˲̬�����ڼ�����ƫ���ϵͳ��Ӧʱ�䡣˲̬�Ŷ�����״��ʾ��λ������ԣ������˿������˽�һ�㻷·�ȶ��ԡ����磬�ٽ�������Ӧ���ܱ�ʾ45����60�����λԣ�ȡ����ߣ�˲̬�ڼ�Ĵ�����ܱ�ʾ��Ҫ�����COUT�����Ļ�·���ϳ��Ľ���ʱ����ܱ�ʾ��Ҫ�ӿ컷·�Ĵ������ͽ�ԽƵ�ʣ�����Щ��Լ�ϵͳ����ܹ�����������濪�ص������Ŀ��ƻ�·�����������λ����ͼ��Ҫ���и�����ķ�����
LTspice®�����������װ��������·֮ǰ���ɿ��ص����������˲�䲨�κͲ���ͼ���������ڴ����˽���ƻ�·���ȶ��ԣ��Ա㿪ʼѡ��Ԫ����ȷ��������ݴ�С��LTspice��ʹ�ù��̻���1975��Middlebrook��������飨����ġ�LTspice������SMPS����ͼ�Ļ������衱����Ŀǰ��Middlebrook�ķ������г���ʵ���ź�ע��λ�ò������ã�����������ĵ������ó�����ͼ1a��ʾ�ij���ע��λ�á�
���⣬���и߱�������ӽ�������LED���ص�LED���������ڷ���·����Ӧ��һ����ͬ��Ŀǰ��ע����Middlebrook��������ע��㣬LTspice��ǰδ��˵����������ܵķ�����չʾ�����LTspice��ʵ����������LED��������������������·����ͼ��
�������ƻ�·����ͼ
�����ص��������ƻ�·����ͼ���������ؼ�����ֵ������ȷ���ȶ��Ժ��ٶȣ�
u ��λԣ��
u ��ԽƵ�ʣ�������
u ����ԣ��
һ����Ϊ���ȶ���ϵͳ��Ҫ45����60�����λԣ�ȣ���Ϊ��֤��·�ȶ�������Ҫ�C10 dB������ԣ������ԽƵ����һ�㻷·�ٶ��йء�ͼ1��ʾ��ʹ����������ǽ�����Щ���������á�
LTspiceģ�������LED�Ŀ��ƻ�·�д������Ƶ�ע��Ͳ�����ͼ2��ʾ��һ��LED��������LT3950��������Ƶ�ʣ�f�����������Ҳ�ֱ��ע�뵽���в��ߣ�ISN���ķ���·���С�������A��B��C���ڼ���ע��Ƶ�ʣ�f���µ����棨dB������λ���㣩��Ϊ�˻����������ƻ�·�IJ���ͼ�������ڴ�Ƶ��ɨ�跶Χ���ظ��ò���������fSW/2��ת��������Ƶ�ʵ�һ�룩��ֹͣ��
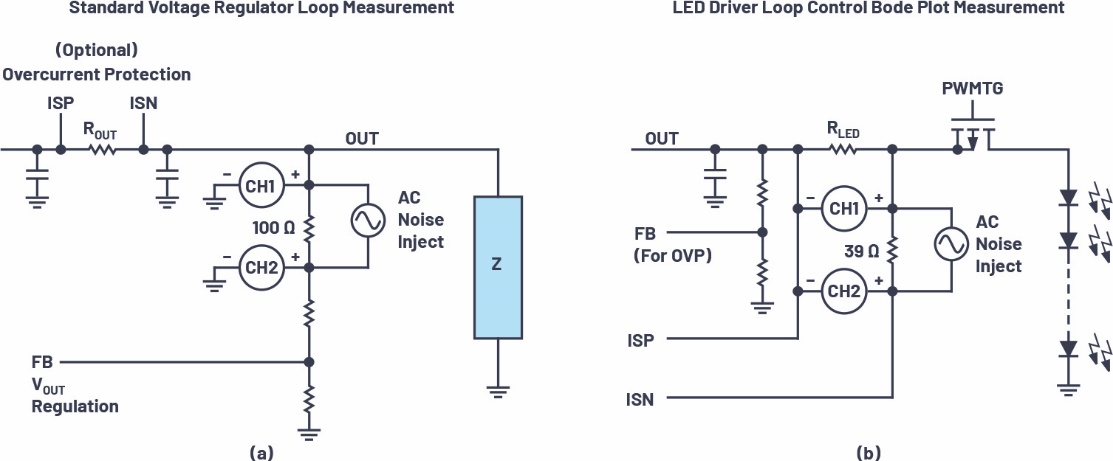
ͼ1.���ص��������ƻ�·����ͼ������������������ǣ����ڣ�a����ѹ�������ͣ�b��LED��������
Ϊ�˽��в��������ƻ�·�Ͽ������Ҳ��Ŷ�������迹·����ͬʱ�����ɴ˲����Ŀ��ƻ�·�������λ��ʹ�����Ա�ܹ�������·���ȶ��ԡ�
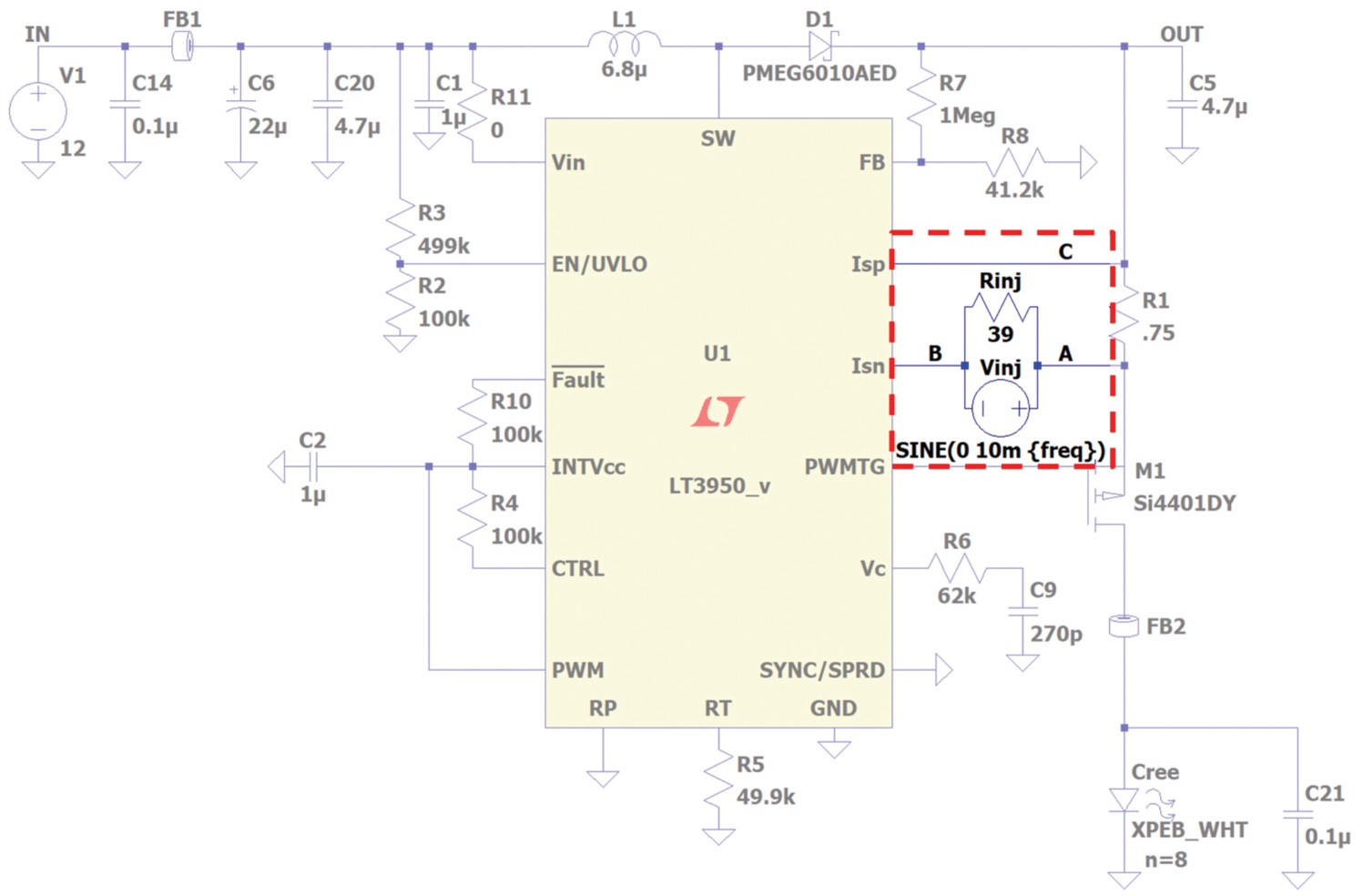
ͼ2.LT3950 DC2788A��ʾ��·LED������LTspiceģ�ͣ������ƻ�·����ע��Ͳ�����
ͼ2�е�A����B�͵�C�IJ���ֵ������ע��Ƶ�ʣ�f���¿��ƻ�·���������λ����ͬ��ע��Ƶ�ʲ�����ͬ���������λ����֮��Ϊ�˽����Ĺ���ԭ������������ע��Ƶ�ʣ�������A-C��B-C���������λ�����������ƻ�·����ͼ�ĵ���Ƶ�ʵ㡣ͼ3a��3b��ʾ��10 kHz��10 mV ACע����������λ��ͼ3c��3d��ʾ��40 kHz��10 mV ACע����������λ��
Ƶ��ɨ���Լ�B-C��A-C֮����������λ�������������ջ�����ͼ����ժҪ����������ͨ�����ڹ���̨��ʹ��һ̨������������������ɵġ���LTspice��Ҳ�ɽ�������ɨ�裬��ͼ4��ʾ��ͨ����ʹ����������ǵ�̨ʽ���Խ�����бȽϣ�֤ʵ��Щ�������ͼ8����

ͼ3.ͼ2�е�A����B�͵�C�IJ���ֵ������ע��Ƶ�ʣ�f���¿��ƻ�·���������λ����ͬ��ע��Ƶ�ʲ�����ͬ���������λ��ͼ3a��3b��ʾ��10 kHz��10 mV ACע����������λ��ͼ3c��3d��ʾ��40 kHz��10 mV ACע����������λ��Ƶ��ɨ���Լ�B-C��A-C֮����������λ�������ɱջ�����ͼ��
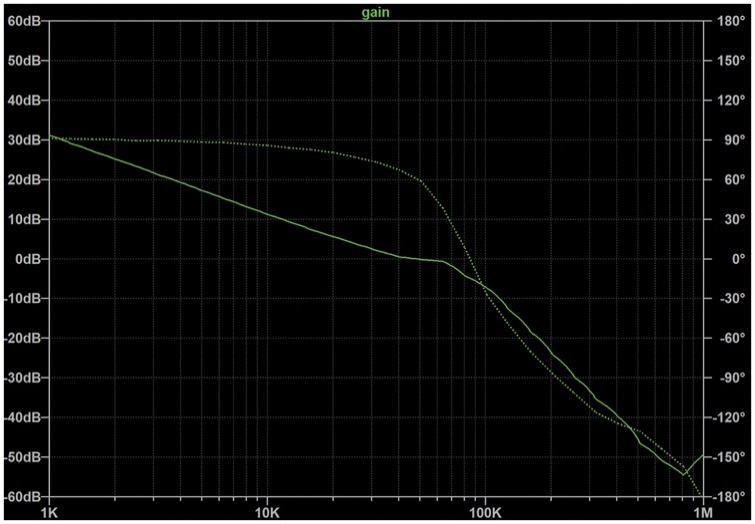
ͼ4.��LTspice�е�LT3950���в���ͼ��������ʾ���棨ʵ�ߣ�����λ�����ߣ�
��LTspice�д���ȫ���������λɨ��Ͳ���ͼ
Ҫ��LTspice��Ϊ���ƻ�·����ȫ������ͼ���������λ��ͼ��ɨ�裬�밴�����в��������
��1��������������ע��Դ
��LTspice�У������10 mV ACע���ѹԴ��ע����裬����ǽڵ�A��B��C����ͼ2��ʾ��������ѹԴֵSINE��0 10m {Freq}������10 mV��ֵ��ɨ��Ƶ�ʡ��û�����ʹ��1 mV��20 mV�����ҷ�ֵ�����м��㡣ע�⣺����LED�������ĸ�Ӧ��ѹ�ֱ�Ϊ250 mV��100 mV���ϸߵ�ע�����������LED����������
��2��������Math
��ԭ��ͼ�Ͻ�����������Ϊ.sp��SPICE��ָ����롣��Щָ��ִ�и���Ҷ�任��ʽ������dB����λ����LED�������ĸ��������������λ��
��ָ�����£�
u .measure Aavg avg V(a)-V(c)
u .measure Bavg avg V(b)-V(c)
u .measure Are avg (V(a)-V(c)-Aavg)*cos(360*time*Freq)
u .measure Aim avg -(V(a)-V(c)-Aavg)*sin(360*time*Freq)
u .measure Bre avg (V(b)-V(c)-Bavg)*cos(360*time*Freq)
u .measure Bim avg -(V(b)-V(c)-Bavg)*sin(360*time*Freq)
u .measure GainMag param 20*log10(hypot(Are,Aim) / hypot(Bre,Bim))
u .measure GainPhi param mod(atan2(Aim, Are) - atan2(Bim, Bre)+180,360)-180
��3������������
����ҪһЩС��ָ����ȣ�Ϊ������ȷ�IJ�������·���봦��ģ����ȶ�״̬������������t0��������Ŀ�ʼʱ���ֹͣʱ�䡣ͨ��ģ��۲�����ʱ���������ó���ʼʱ�䡣�ﵽ�ȶ�״̬��ֹͣʱ�䶨Ϊ10/freq����10�����ڣ�ͨ����ÿ��Ƶ�ʵ�10��������ƽ��ֵ��������
��ָ�����£�
u .param t0=0.2m
u .tran 0 {t0+10/freq} {t0} startup
u .step oct param freq 1K 1M 3
��4��������Ƶ�ʲ��������ͷ�Χ
.step��������ִ�з�����Ƶ�ʷֱ��ʺͷ�Χ�������У�ʹ��ÿ��Ƶ��3��ķֱ��ʣ�ģ��1 kHz��1 MHz������ͼ�������Ծ���fSW/2��Ƶ����������Ϊϵͳ����Ƶ�ʵ�һ�롣��Ȼ����Խ�࣬�ֱ���Խ�ߣ�����ʱ��Խ����ÿ��Ƶ��3������͵ķֱ��ʣ�������С�ֱ������з���ɽ�ʡһЩʱ�䡣������������ڿ���5���ӵķ������ơ���װ�Ͳ���ӡˢ��·��켸����������������㣬�Ը��ߵķֱ������У�����ÿ��Ƶ��5������ϣ����ɸ������Ҹ����ײ鿴�Ľ����
��5���������
���Ƚ�ֱ�ۣ���LTspice��Ҫ���������������ͼ����һ�������з��棬�ݲ�����ͼ��ֻ��ʾ������Χ�ĵ�ѹ�͵�������ֵ���������²������ɲ���ͼ��
��6������������ͼ
�Ҽ�����ԭ��ͼ���ڣ���SPICE������־�� ��ѡ��Plot .step��ed .meas data���ӡ���ͼ����Ŀ¼����ѡ�ɼ����ߡ���Ȼ��ѡ�����桱���������ݡ����ߣ���ͨ�������ļ���Ȼ��ѡ�����ݵ���Ϊ�ı��������������ݵ�CSV�ļ��������������ݣ�
�ڷ���֮��ʹ����������ǽ��в���ͼȷ�ϡ�
���ƻ�·�ķ��治����ʵ�������ɿ�����������ȫ��֤��·���ȶ��Ժ�ԣ�ȡ�����ƹ��̵�ij���Σ�Ӧ��ʵ����ʹ����������ǹ�����֤���ƻ�·��
LTspice�����ɵIJ���ͼ��������������ǵIJ���ͼ��������Ƚϡ����Ʒ��棬ͨ��������ע�뷴����·�������ʹ���A-B��A-C���������λ������ʵ�ʵĻ�·�����������������ʾ��ͼ����Ƭ��ͼ5��ͼ7��ʾ��
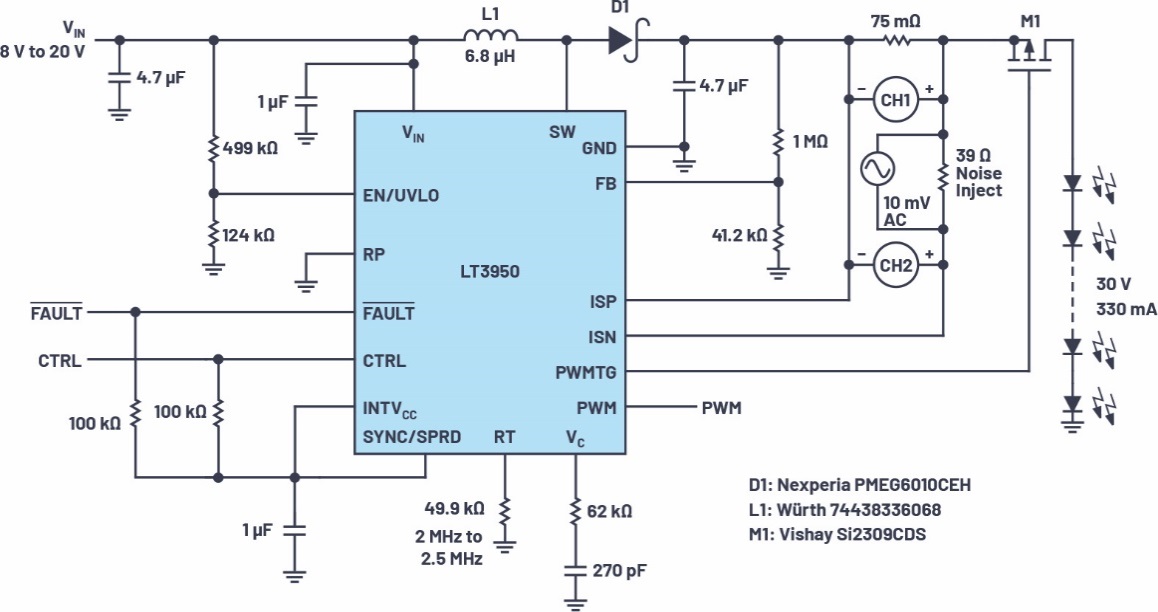
ͼ5.��������ǵ�LED���������ƻ�·����ͼ��������
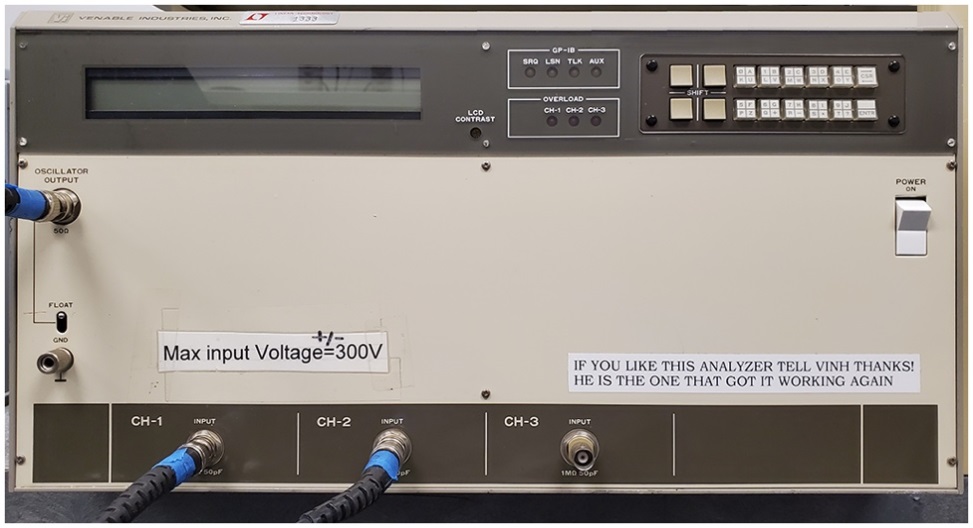
ͼ6.Venable System Model 5060A��ʽ��������ǣ����ڸ߱߸�������ע���LED�������IJ���

ͼ7.LT3950 LED�������ϵ�����ע��Ͳ�����
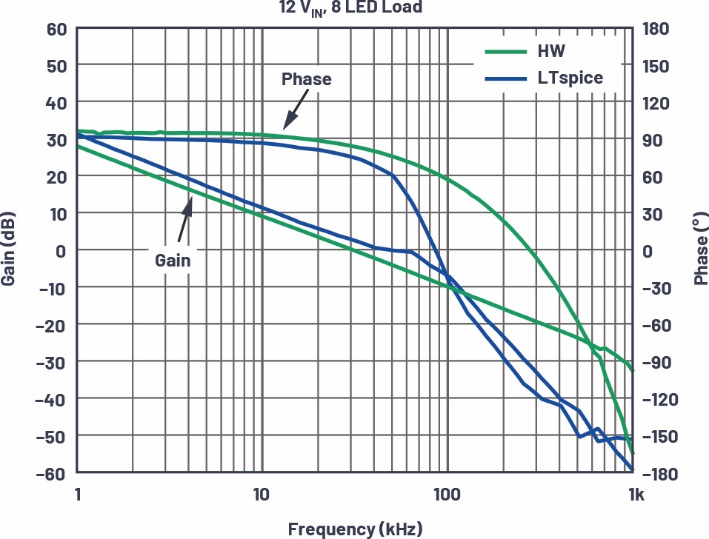
ͼ8.DC2788A��ʾ��·���ϵ�LT3950 LED�������IJ���ͼ��
ͨ��LTspiceģ�����ɵ�ͼ�����ߣ���ʹ��������������ɵ�ͼ�����ߣ������ǿ��
��1.LT3950 LED�������IJ���ͼ�������ݱȽϣ�LTspice vs.���������
�������� ��ԽƵ�ʣ�Hz�� ����ԣ��(dB) ��λԣ�ȣ��㣩
��������ǣ�8 VIN 16.75 17.47 83.96
LTspice��8 VIN 15.8 13.79 71.23
��������ǣ�12 VIN 30.41 18.71 83.73
LTspice��12 VIN 47.36 5.04 62.29
Ltspice��������ʾ��������������ݵ�ǿ����ԣ�֤��LTspice��LED����������е���Ч���ߡ���������ŵIJο�����������ʦ��СԪ��ѡ��Χ���ϵ�Ƶ���µ��������λ��Ӳ���dz�������ϸ�Ƶ���µķ������ݺ�Ӳ������֮��IJ����������ܴ����˶Ը�Ƶ���㡢��㡢������С����ݺ͵�Ч�������轨ģ����ս��
����
LTspice��ģ���ڲ������ƻ�·�������λ������LED�������IJ���ͼ��Ltspice�������ݵľ�ȷ��ȡ������ʹ�õ�SPICEģ�͵ľ�ȷ�ȣ���ȷ�ؽ�ģÿ��Ԫ���Խ����ʵ��������ӷ���ʱ�䡣��LED��������ƶ��ԣ�û�����Ƶ�Ԫ����ģ��LTspice����Ҳ��������ԽϿ����СԪ����Χ��Ԥ�������·���ܡ������������ڹ��ɵ�Ӳ�����֮ǰָ����ƹ���ʦ����ʡ�������ʱ�䡣���Ե�ѡ��Ԫ����ʹ�����ð����������ǵIJ�������ȷ�ϻ�Աȷ���������Ϊ�����ڼ�Ӳ����֤��һ���ֶΡ�
�ο����ϣ�
1 Gabino Alonso.��LTspice������SMPS����ͼ�Ļ������衣Analog Devices, Inc.
�����
Keith Szolusha��ADI��˾Ӧ���ܼ࣬�����ص�λ������������������ʥ����������2000����Keith��ְ��BBI Power Products Group���ص��ע��ѹ����ѹ-��ѹ��LED��������Ʒ��ͬʱ��������Դ��Ʒ����EMI�ҡ�����ҵ�����������ݽ�������ʡ����ѧԺ(MIT)��1997����������ѧʿѧλ��1998����������˶ʿѧλ��ר������д������ϵ��ʽ��keith.szolusha@analog.com.
Brandon Nghe��Analog Devices��Ӧ�ù���ʦ��2020���ü�������������������ѧ��������˶ʿѧλ��Brandon����Ϊ����Ӧ����ƺͲ�����ѹ����ѹ-��ѹ��LED�������ĵ͵�Ÿ���DC/DC�任������ϵ��ʽ��brandon.nghe@analog.com.