分享一款无线视频传输模块,LEADIY-WIFI100视频模块,传输距离远、体积小、低功耗!
2015年09月30日 15:41 发布者:没有伞的孩子
介绍:传输距离远、体积小、低功耗、低延时、重量轻,板载串口,方便与单片机等通讯。可作为飞碟、飞机、航模、DIY小车的遥控器。具有录像、拍照、重力感觉控制、摇杆控制功能,通过wifi直连方式与安卓及苹果手机或平板电脑连接,进行视频观看及命令控制。1. 概述极控app用于与wifi602视频模块配套使用,可以实时观看wifi602无线传输的流媒体,并且能把摇杆信号发送到wifi602视频模块上。Wifi602接收到的极控app遥控器信号通过串口发送到飞控板上,具体可见wifi602使用说明。以下说明,以安卓版本做为示例,苹果版本操作类似。App版本仍在不断更新,界面和功能都会有所变化,请视实际情况操作。
特性:l 支持android2.3~4.4版本l 支持音频播放l 支持视频播放l 支持视频图像缩放功能l 支持视频录像功能l 支持视频截图功能
2. 应用领域l 智能家电l 智能家居,比如智能插座、万能遥控器等等l 个人医疗、健康类产品l 汽车电子l 工业控制l 物联网其它产品
3. 技术规格
名称
参数
工作电压(V)
3.7~5V
接口类型
UART
接口速率(bps)
1120~2M
WIFI通信最高速度(Mbps)
54
启动时间(s)
15
休眠时功耗(mW)
< 10
最大发送数据时功耗(mW)
<350mW
接收数据时功耗(mW)
< 200mW
存储温度(℃)
-55 ~ +125
工作温度(℃)
-20~+70
尺寸(mm * mm)
51 * 22
4. 模块引脚图
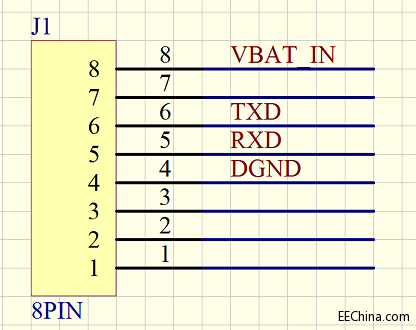
5. 引脚功能描述
Pin Number
分组说明
引脚名称
I/O
描述
1
保留
空
2
空
3
空
4
电源
DGND
P
电源负极
5
串口
RXD
I
串行数据输入,接单片机的TXD
6
TXD
O
串行数据输出。接单片机的RXD
7
保留
空
8
电源
VBAT_IN
P
电源正极,3.7~5V电压
6. 引脚功能详细说明6.1 保留位扩展功能预留端口
6.2 串口标准的TTL串口功能,默认串口参数:115200、8bit、无校验、停止位1bit手机遥控器app每间隔20ms发送一帧数据,帧长度为12个字节。6.3 电源接口WIFI601模块是3.7~5V 单电源供电
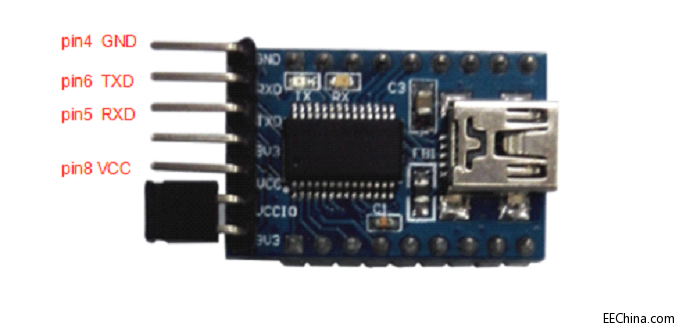
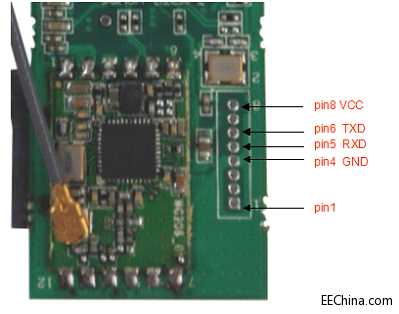 7. 硬件连接图
7. 硬件连接图与USB串口模块相连,USB 串口模块的+5V,TXD,RXD,GND 接Wifi602模块的 VCC,RXD,TXD,GND。注意 TXD 和 RXD 的交叉:
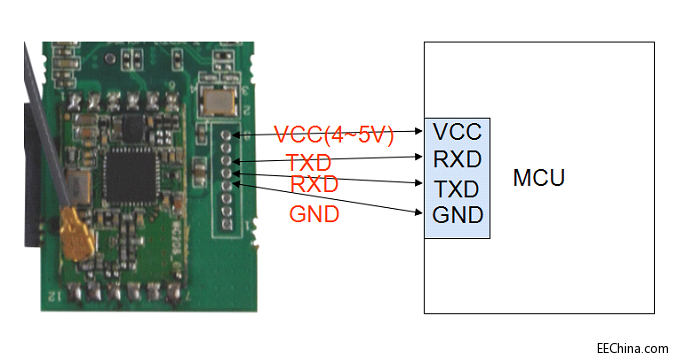
与单片机相连,同样注意TXD和RXD交叉相连:
8. 使用说明首先准备好wifi602视频模块,在设置->WLAN打开手机wifi界面。扫描wifi热点,待出现热点名为a.intchip时,点击连接。待wifi连接成功后,点击极控app,进入启动页面,点击播放。
9. 摇杆操作进入遥控界面后,出现左右两个摇杆图盘。左边摇杆:主要操作油门和四轴的自旋功能。其中上下移动控制油门大小,左右移动控制自旋方向;手指离开左摇杆后,油门保持最后的值,自旋值归0;右边摇杆:主要操作前进/后退和左飞/右飞功能。其中上下移动控制四轴的前进、后退;左右移动控制四轴的左飞、右飞;手指离开右摇杆后,自动归0。
10. 视频录像、截图视频录像、截图点击后,进入视频录像和截图;其中,视频录像存储位置为/inichip/video目录下,视频截图存储位置为/intchip/capture目录下。11. 视频传输模式采用RTSP流媒体传输方式,可以用VLC在手机和电脑端播放实时视频,也可以采用软芯软研发的手机播放软件。l 安卓手机版本下载:在360手机助手或者360安全市场里,搜索关键字“GeekRC”后点击下载安装。l 苹果手机版本下载:在app store里,搜索关键字“GeekRC”后点击下载安装。软件无广告、无病毒,可以放心使用。
无线传输距离:空旷地环境下,笔记本电脑可达200米范围;手机160米范围;无线环境比较复杂,传输距离受到干扰变化较大。如:周围wifi信号干扰、生物体(人、动物等)吸收信号、建筑物干扰。传输码率:2Mbps
12. 多媒体说明12.1 视频视频带宽:最大8Mbps视频编码:h264视频码流:CBR视频像素:100w/30w可选视频格式:720P 分辨率:1280*720帧率:30帧每秒12.2 音频音频编码:ACC
13. 多媒体存储模式13.1 TF卡存储 支持市面常见TF卡,最大容量32G。
13.2 存储模式开机前,插入TF卡。系统自动识别是否插卡、卡空间是否足够。如果开机前没有插卡或者卡剩余空间不足,不会进入录像模式。当检测到TF卡正常后,系统自动进入录像模式。录像格式如下:1、采用avi通用模式,支持所有播放器;2、视频模式:高清VGA(分辨率640x480,30帧每秒),支持百万像素3、音频模式:ACC4、分段保存:2分钟一段视频,保证视频完整性视频大小:1分钟20M,4G容量的TF卡可录近200分钟
14. 通信协议连接板子,手机与wifi热点连接成功后,打开手机app。出现视频界面后,手机每隔20ms将遥控数据发送到wifi602上。Wifi602再通过串口与单片机通信,每种控制字占用一个字节(8bits),数据说明如下:
数据编号
指令内容
功能
说明
Buf0
帧起始码
判断一帧开始
固定为十六进制:0X81
Buf1
校验位
检查帧数据是否正确
Buf2~Buf10异或结果,不包括帧起始码和结束码
Buf2
油门
控制飞行器上升、下降
范围0~127,初始为0。手指离开摇杆后不归0,即保持油门值。对应左边摇杆上下操作
Buf3
左右
控制飞行器向左、向右
范围-100~100,初始为0。对应右边摇杆,移到最左边为-100,移到最右边为100。手指离开摇杆后归0
Buf4
前后
控制飞行器前进、后退
范围-100~100,初始为0。对应右边摇杆,移到最上面为100,最下面为-100。手指离开摇杆后归0
Buf5
自转
控制飞行器原地旋转
范围-100~100,初始为0。对应左边摇杆,移到最左边为-100,最右边为100。手指离开摇杆后归0
Buf6
按键
一键起飞、一键降落
按下一键起飞:与0x80异或;按下一键降落:与0x40异或。
Buf7
左右微调
修正左右漂移
范围-50~50,初始为0。修正左右漂移。
Buf8
前后漂移
修正前后漂移
范围-50~50,初始为0。修正前后漂移。
Buf9
保留3
未使用
发送十六进制:0x00
Buf10
保留4
未使用
发送十六进制:0x00
Buf11
帧结束码
判断一帧结束
固定为十六进制:0X82
15. 数据帧提取代码考虑串口接收中断响应及时和多平台移植,数据帧处理分成两个部分:串口接收模块和帧提取模块。如果单片机资源不足可以合并在一起处理。
l 串口接收模块代码示例:
#define UART_BUFFER_SIZE 64
volatile uint8_t rxBuffer;volatile uint8_t rxBufferRTail = 0;volatile uint32_t g_u32RecCnt = 0;
void UART0_IRQHandler(void){ volatile uint8_tu8InChar=0xFF; volatile uint32_tu32IntSts= UART0->ISR;
if(u32IntSts &UART_ISR_RDA_INT_Msk) { /* Get all the inputcharacters */ while(_UART_IS_RX_READY(UART0)) { /* Get thecharacter from UART Buffer */ u8InChar=UART0->RBR; /* Check if buffer full */ rxBuffer = u8InChar; rxBufferRTail++; if (rxBufferRTail>= UART_BUFFER_SIZE ) rxBufferRTail = 0; g_u32RecCnt++; } }}串口只负责接收数据,保存到缓存里,并且记录当前的数据个数和写缓存索引号。l 帧提取代码示例:#define WIFI_RC_FRAME_LEN 11 /* 遥控器数据帧长,不包含帧结束码 */#define WIFI_RC_FRAME_START 0x81 /* 帧起始码,固定为0x81*/#define WIFI_RC_FRAME_END 0x82 /* 帧结束码,固定为0x82*/
int read_wifi_data(unsigned char *Rxbuf,int len){ int i, k, write_idx; unsigned char recv_buf;
/* 数据长度不够,返回 */ if (WIFI_RC_FRAME_LEN > g_u32RecCnt) { return 0; } //debug_info("cnt %d ", g_u32RecCnt);
/* 保存串口接收缓存 */ memcpy(recv_buf, (unsigned char *)rxBuffer, UART_BUFFER_SIZE); write_idx = rxBufferRTail; // 写索引 /* 写索引回减1帧数据长度 */ if (WIFI_RC_FRAME_LEN <= write_idx) { write_idx -= WIFI_RC_FRAME_LEN; } else { write_idx = WIFI_RC_FRAME_LEN - write_idx; write_idx = UART_BUFFER_SIZE - write_idx; }
/* 向后查找一个完整且有效帧*/ /* 只查找2个帧长-1, 这样如果当前数据无效会用上一帧数据 */ for ( i = 0; i < WIFI_RC_FRAME_LEN*2-1; i++ ) { //debug_info("%x ", recv_buf); /* 查找到起始位后,进行校验*/ if (WIFI_RC_FRAME_START == recv_buf) { unsigned char check = 0; unsigned char rc_date; /*数据*/ int idx = write_idx;
/* 校验位移数据是否正确接收*/ for ( k = 0; k < WIFI_RC_FRAME_LEN; k++ ) { check ^= recv_buf; rc_date = recv_buf; idx = (idx++) < UART_BUFFER_SIZE ? idx: 0; }
if ( (WIFI_RC_FRAME_START ==check) /* 多异或了第0位,所以最后结果应该是第0位*/ &&(WIFI_RC_FRAME_END ==recv_buf)) /* 结束位判断,不在有效数据内 */ { for ( k = 0; k
return 1; } } /* 回减到有效数据元素 */ write_idx = (write_idx--) < 0 ? (UART_BUFFER_SIZE - 1) : write_idx; }
return 0;}
16. 电气特性
名称
描述
Min
Typ
Max
单位
Vin
Vin=3.7~5V
3.7
4
5
V
供电电流
Vin=4V
250
300
350
mA
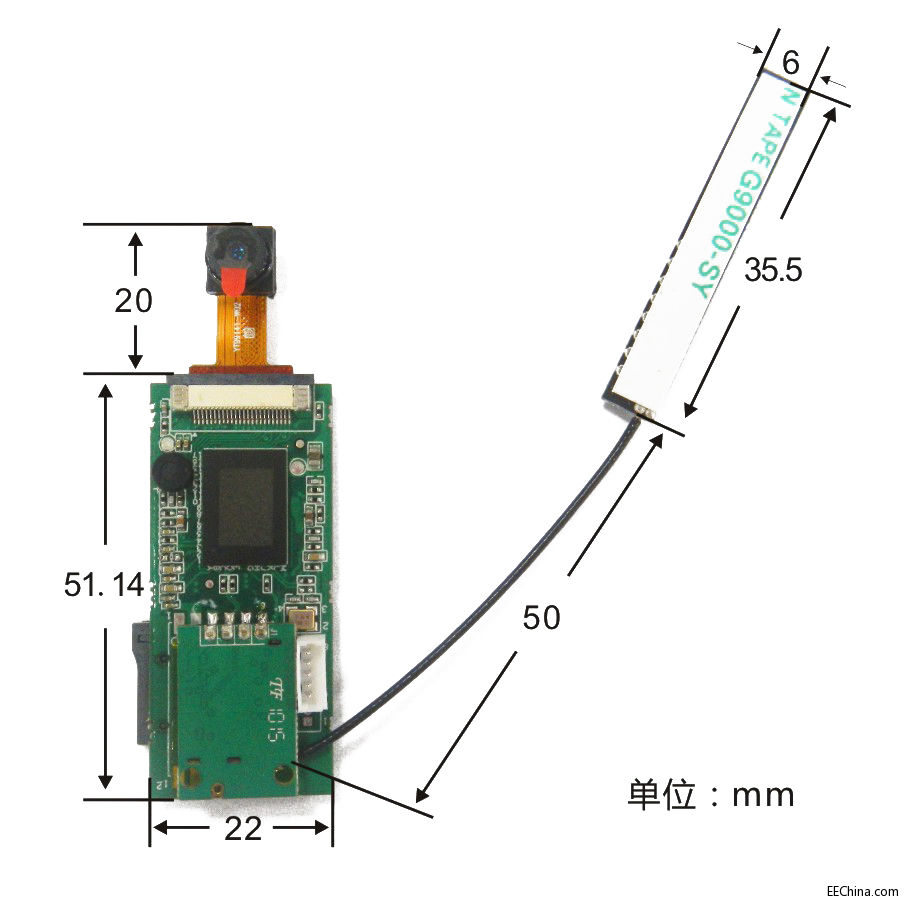
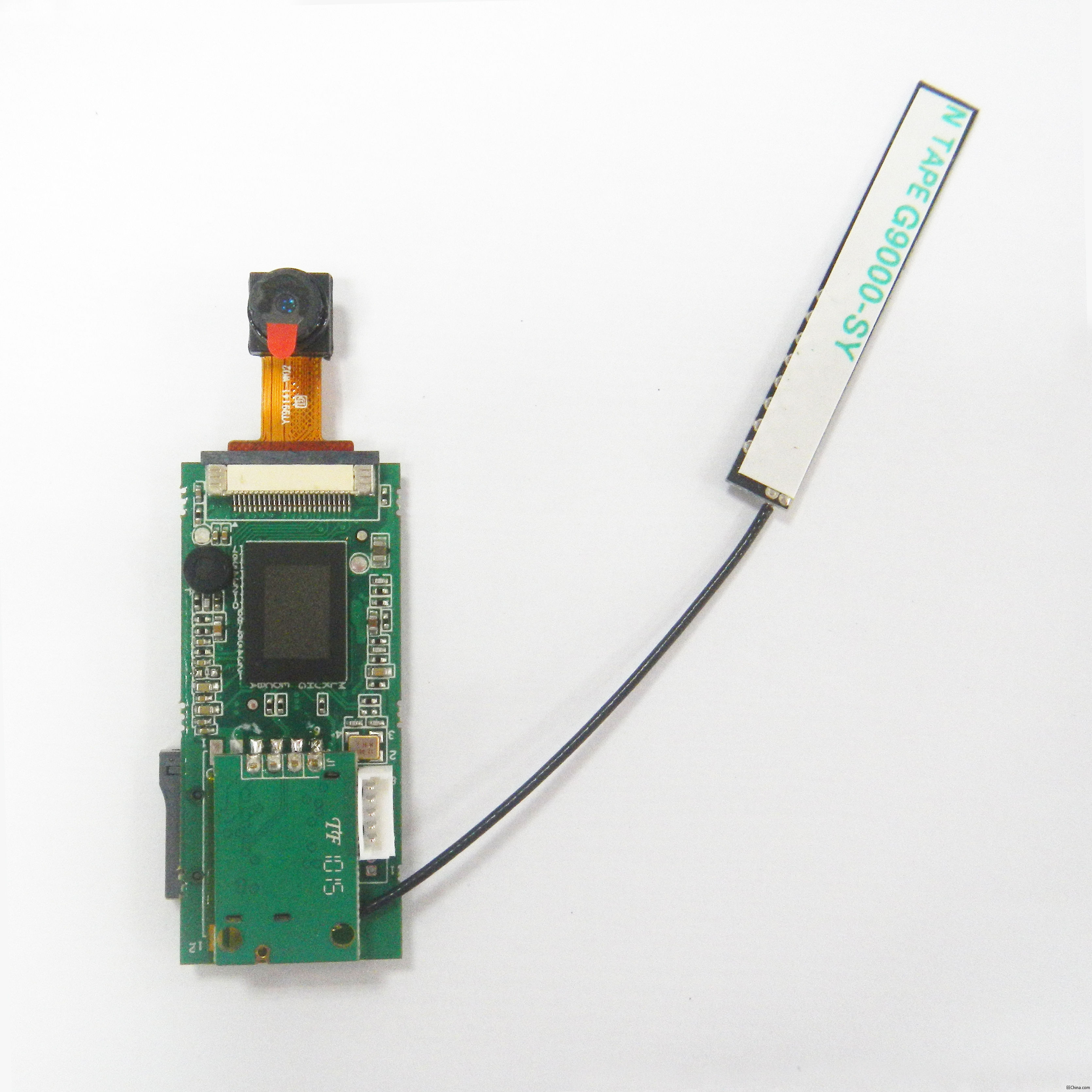
17. 外观尺寸天线长度、摄像头尺寸视实际需要而定。