电池供电电子产品中的位置编码
2015年06月09日 10:34 发布者:designapp
在所有的传感器技术领域中,超低功耗节能设计的趋势非常明显。带有无线网络和故障安全保护功能的便携式设备和传感器尤其需要对位置数据进行低功耗测量。此外,在很多应用中,即便外部电源不可用,也需要检测出位置变化。测量所需的能量可通过能量采集解决方案获得或由电池提供。使用霍尔传感器的磁性位置测量,可以集成到包含完整信号调理电路的单芯片编码器中。集成式霍尔传感器可节省空间和节约成本,但工作期间所需的功率相对较高。这里的解决方法是让霍尔传感器短时启动。快速位置测量(像电机控制所需的位置测量)需要霍尔传感器快速评估和发送脉冲,而计量应用程序所需要的采样率较低。因此,节能工作需要采取特殊的解决方案。
如果实现微安?
霍尔传感器生成的信号电压与磁通密度和霍尔元件中的电流成比例。当使用CMOS技术实现时,传感器的性能由工艺确定。因此,只能通过减少霍尔元件的测量周期,降低电源电压以及使用超低功耗电路设计技术(ULP)来降低电流消耗。
测量频率仅设置在位置测量所需的那样高。只有在确实需要时,ULP电路设计才会启动个别功能模块。可编程的掉电和唤醒电路可确保避免不必要的启动,从而将平均电流消耗降至最低。将I/O端口的供电电压减少至3.3V或1.8V,可进一步减少电流消耗,简化电池的选择。
为减少外部磁场的干扰,一对霍尔传感器可用于一体化的霍尔编码器集成电路,适用于不同的磁场组件。磁场由在芯片上方旋转的磁铁生成。使用三相抽样法时仅需要3个霍尔传感器,而非惯用的4个传感器,这样可以减少约25%的电流消耗。
始终开启
为实现持久的电池供电工作,集成单芯片ULP设计必须能够完全自动开关。图1显示了基于iC-Haus公司iC-TW11的这种ULP架构。这一器件是专门为电池供电的、需要高集成度节能和精确位置测量应用而开发的。它通过SPI接口与中央微控制器(ULP设计更好)相连。只有在真的需要时,霍尔传感器才会进行位置测量和采样。
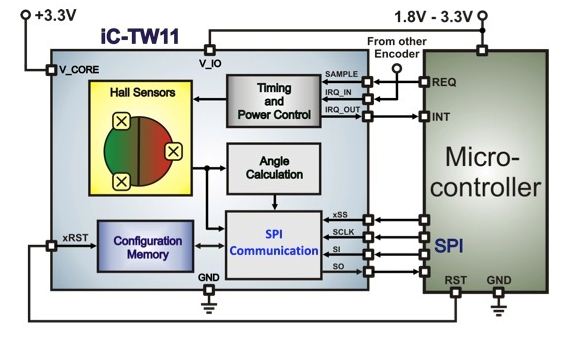
图1:带有微控制器的超低功耗霍尔编码器架构。
Hall Sensors霍尔传感器
From other Encoder来自其他编码器
Timing and Power Control时序和电源控制
SAMPLE采样
Angle Calculation角度计算
Configuration Memory配置存储器
SPI Communication SPI通信
Micro-controller微控制器
它没有不必要的测量周期,因为这样可能会浪费电池的电能。在完成测量和转换后,所有不需要的电路元件将会关闭。同时,霍尔传感器、带控制和自动校准的下行放大器电路以及角度测量插值的采样必须同时做到快速和节能。这样,在10Hz采样率和10位分辨率的情况下实现了低于3μA的平均电流。
在位置测量之间自动启动待机模式中,完整单芯片霍尔编码器的最大电流消耗仅为100nA。供电电流与所选采样频率的函数关系如图2所示。连接到外部的接口工作在3.3V或1.8V电压下。因此,与使用较低供电电压的ULP微控制器接口时,不需要电平转换电路。
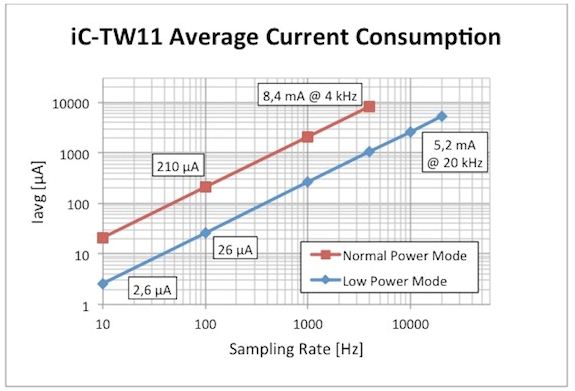
图2:电流消耗与采样率的关系。
iC-TW11 Average Current Consumption iC-TW11平均电流消耗
Normal Power Mode正常功耗模式
Low Power Mode低功耗模式
Sampling Rate采样率
对于位置测量,希望实现短时测量,这意味着在测量开始和结束之间的延时较短。为了使ULP微控制器在一次位置测量之后能切换到待机模式,该器件设置了唤醒微控制器的中断输出。如果需要多个位置值,如可移动的多轴机器人,设计时可通过一个SPI链路和多个中断线路将多个iC-TW11级联起来。由于并不总是需要有最高精度,集成滤波器功能可以关闭,以节能更多的电能。
在正常工作中,iC-TW11采样率达到4kHz,且滤波器和自动放大器校准功能开启,以实现10位分辨率的最大精度。如果关闭滤波器,延时可降低到50μs,采样率最高可达20kHz。在采样率相同的情况下,关闭滤波器通常可减少近乎90%的电流消耗。可由微控制器或通过单独的触发输入(即外部事件)启动测量周期。如果有新的位置值,微控制器通过中断从待机模式切换至工作状态。绝对位置数据通过时钟速率高达16MHz的4线SPI接口读取。由于iC-TW11和微控制器的工作时间减少,高时钟速率也将影响到电流消耗的减少。对于测试目的或磁气隙测量的需求,内部原始霍尔传感器值(10位)、正弦值和余弦值(12位)以及放大系数(18步)可选。
如果峰值电流由电容器提供,可使用能量采集解决方案(如带无线传感器的方案)替代电池。对于数字控制按钮,也可以用超级电容器缓冲来应对电源故障。
切换电源线路
在某些应用中,即便在外部电源不可用的情况下,也需要进行高能效位置测量。对于机器人来说,在出现电源故障后,其由于惯性仍可继续移动,如果未能识别到位置变化,且在错误数据下重启,将会发生危险。因此,这些执行器的所有连续移动必须通过多匝编码器安全地检测出。其要么有机械齿轮,要么有带电源故障保护(如配备电池)的电子记录功能。对于消耗量测量设备,如工业水/气表,即便在没有外部供电电压的情况下,也必须能够实现采集。因此,必须能够在电池供电和外部供电之间实现自动切换。
图3显示了使用iC-PV对叶轮进行磁扫描的气表或水表的方框图。这一ULP单片霍尔编码器可在节能电池工作和正常电网工作之间自动切换。
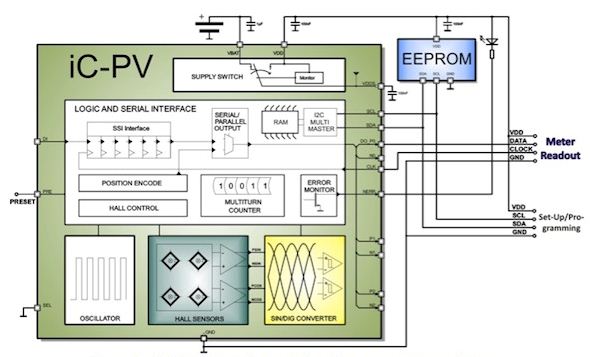
图3:工业水/气表计量应用中的ULP编码器。
Preset预置
Meter表计
Readout读数
如果供电电压VDD降低至低于限定电平,iC-PV将自动切换至电池供电VBAT。在电源恢复后,iC-PV通过串行接口为读数器件提供计数值,用于消耗量计算。测量结果通过8位CRC核对,误差通过低电平有效NERR输出以及串行数据传输中的误差位来反映。
4个霍尔传感器以可调1至3位分辨率检测位置变化。旋转数在长度高达40位的多匝计数器中计数。iC-PV也具有3位八进制分辨率的并行输出。外部EEPROM在校准期间通过单独的I2C接口进行编程,iC-PV在上电时加载CRC所保证的配置数据。
在工作模式和待机模式下,iC-PV的ULP设计采用类似于此前描述的iC-TW11的方法来减少电流消耗。然而,iC-PV有自己独立的周期和时序控制,以在无需使用外部微控制器的情况下,周期性地启动规定的测量周期。根据设定的采样率,旋转可在12000rpm至100000rpm的速度范围内进行计数。平均电流消耗范围从仅2μA至30μA,从而使电池缓冲的工作可维持数年。
总结
如两个案例所示,使用ULP单芯片霍尔编码器进行的位置测量,可在直接电池工作或甚至是在出现电源故障的情况下有效进行。在第一个案例下,测量周期通过微控制器进行外部控制和处理。在发生电源故障的案例中,单芯片霍尔编码器iC-PV通过备份电池供电。变化能够被检测并保留,以至于在外部电源恢复时能够用于发送。由于通过ULP设计技术可实现极低电流消耗(小于10μA)的解决方案,在单芯片编码器中对霍尔传感器和模拟和数字评估电路进行集成非常有利。