Nuvoton NuMicro NUC140 MCU开发方案
2012年05月15日 11:17 发布者:1770309616
新唐科技(Nuvoton)的NUC140VE3AN是带全速USB 2.0 和 CAN功能,内嵌Cortex™-M0内核,最高可运行至50MHz的MCU,集成了32K/64K/128K字节的Flash存储器,以及4K/8K/16K字节SRAM,4K字节用于存储ISP引导代码的ROM,和4K字节的数据 Flash 存储器。另外还有丰富的外设,如定时器,看门狗定时器,RTC,PDMA,UART,SPI, I2C,I2S,PWM 定时器,GPIO,LIN,CAN,PS/2,USB 2.0 FS 设备,12位ADC,模拟比较器,低电压复位控制和欠压检测功能,主要用在工业控制,数据通信,USB应用以及马达控制,汽车和消费类产品.本文介绍了NuMicro™ NUC140系列主要特征,选型指南和框图,以及NuTiny-SDK-NUC140开发板主要特性,电路图和CAN演示板应用示意图.NuMicro™ NUC140 Connectivity Line 带全速USB 2.0 和 CAN功能,内嵌Cortex™-M0内核,最高可运行至50 MHz,内建32K/64K/128K字节的Flash存储器,以及4K/8K/16K字节SRAM,4K字节用于存储ISP引导代码的ROM,和4K字节的数据 Flash 存储器。另外还有丰富的外设,如定时器,看门狗定时器,RTC,PDMA,UART,SPI, I2C,I2S,PWM 定时器,GPIO,LIN,CAN,PS/2,USB 2.0 FS 设备,12位ADC,模拟比较器,低电压复位控制和欠压检测功能。
NuMicro™ NUC140主要特征:
• 内核
– ARM® Cortex™-M0 内核最高运行 50 MHz
– 一个 24-位系统定时器
– 支持低功耗睡眠模式
– 单周期32位硬件乘法器
– 嵌套向量中断控制器(NVIC)用于控制32个中断源,每个中断源可设置为4个优先级
– 支持串行线调试(SWD)带2个观察点/4个断点
• 内建 LDO,宽电压工作范围 2.5 V 到 5.5 V
• Flash 存储器
– 32K/64K/128K 字节 Flash 用于存储程序代码
– 4KB flash 用于存储ISP引导代码
– 支持在系统编程 (ISP)方式更新应用程序
– 支持512 字节单页擦除
– 在128K字节系统中可配置数据FLASH地址和大小,在32K字节和64K字节系统中固定为4K字节数据
– 通过SWD/ICE接口,支持2 线 ICP升级方式
– 支持外部编程器并行高速编程模式
• SRAM 存储器
– 4K/8K/16K 字节内建 SRAM
– 支持 PDMA 模式
• PDMA (Peripheral DMA)
– 支持9通道 PDMA 用于SRAM和周边设备的自动数据传输
• 时钟控制
– 针对不同应用可灵活选择时钟
– 内部 22.1184 MHz 高速振荡器可用于系统运行
􀂋 在+25 ℃,VDD = 5.0 V时, 精度校正到± 1 %
􀂋 在-40 ℃ ~ +85 ℃ 和 VDD = 2.5 V ~ 5.5 V范围内, 精度为± 3 %
– 内部低功耗 10 KHz 低速振荡器用于看门狗及掉电模式唤醒等功能
– 支持一组PLL, 高至 50 MHz, 用于高性能的系统运行
– 外部 4~24 MHz 晶振输入用于 USB 和精准的定时操作
– 外部 32.768 kHz 晶振输入用于 RTC 及低功耗模式操作
• GPIO
– 四种 I/O 模式:
􀂋 准双向模式
􀂋 推挽输出模式
􀂋 开漏输出模式
􀂋 高阻输入模式
– TTL/Schmitt 触发输入可选
– I/O 引脚可被配置为边沿/电平触发模式的中断源
– 支持大电流驱动和灌入 I/O 模式
• Timer
– 支持4组32位定时器, 每个定时器有一个24位向上计数定时器和一个8位预分频计数器
– 每个定时器有独立的时钟源
– 提供 one-shot, periodic, toggle and continuous 计数操作模式
– 支持事件计数功能
– 支持输入捕捉功能
• Watchdog Timer
– 多路时钟源
– 从1.6ms 到26.0sec 有8个可选的定时溢出周期(取决于所选的时钟源)
– WDT 可用作掉电模式/睡眠模式的唤醒
– 看门狗定时溢出的中断/复位选择
• RTC
– 通过频率补偿寄存器(FCR) 支持软件频率补偿功能
– 支持RTC计数(秒,分,小时) 及万年历功能(日,月,年)
– 支持闹铃寄存器(秒,分,小时,日,月,年)
– 可选择为12小时制或24小时
– 闰年自动识别
– 支持周期时间滴答中断,包括8个可选周期1/128, 1/64, 1/32, 1/16, 1/8, 1/4, 1/2 和 1 秒
– 支持唤醒功能
• PWM/Capture
– 内建四个16位PWM产生器,可输出8路PWM或4组互补配对PWM
– 每个PWM产生器配有一个时钟源选择器,一个时钟分频器,一个8位时钟预分频和一个用于互补配对PWM的死区发生器
– 8路16位捕捉定时器(共享PWM定时器)提供8路输入的上升/下降沿的捕捉功能
– 支持捕捉(Capture)中断
• UART
– 最多三组UART控制器
– 支持流控 (TXD, RXD, CTS 和 RTS)
– UART0 带 64-字节 FIFO 用于高速模式
– UART1/2 (可选)带16-字节 FIFO 用于标准模式
– 支持 IrDA (SIR) 和 LIN 功能
– 支持 RS-485 9 位模式和方向控制
– 可编程波特率发生器频率高至1/16系统时钟
– 支持 PDMA 模式
• SPI
– 最高支持4组 SPI 控制器
– 主机速率高至 32 MHz,从机高至 10 MHz (芯片工作在 5V 状态时)
– 支持 SPI 主机/从机模式
– 全双工同步串行数据传输
– 可变数据长度(从1位到 32 位)传输模式
可设置MSB 或LSB 在前的传输模式
– 在时钟上升沿或下降沿接收还是发送是独立配置的
– 当作为主机时2条从机片选线,作为从机时1条从机片选线
– 支持 32-bit 传输模式下的字节睡眠模式
– 支持 PDMA 模式
– 支持三线无从机选择信号的双向接口
• I2C
– 最多支持2组 I2C 设备
– 主机/从机模式
– 主从机之间双向数据传输
– 多主机总线支持(无中心主机)
– 多主机间同时传输数据仲裁,避免总线上串行数据损坏
– 总线采用串行同步时钟,可实现设备之间以不同的速率传输
– 串行同步时钟可作为握手方式控制总线上数据暂停及恢复传送
– 可编程的时钟适用于不同速率控制
– I2C总线上支持多地址识别(4个从机地址带mask选项)
• I2S
– 外部音频 CODEC 接口
– 可作主机也可作从机模式
– 能处理8, 16,24 和 32 位word
– 支持单声道和立体声的音频数据
– 支持I2S 和 最高有效位数据格式
– 提供两组8字的FIFO数据缓存,一组用于发送,一组用于接收
– 缓冲区超过可编程边界时,产生中断请求
– 支持两组DMA请求,一组用于发送,另一组用于接收
• CAN 2.0
– 支持 CAN 2.0A 和 2.0B 协议
– 位传输速率最高至1M bit/s
– 32个报文对象
– 每个报文对象有其自己的标识符掩码
– 可编程的 FIFO 模式(链接报文对象)
– 可屏蔽中断
– 时间触发的CAN应用中禁用自动重传模式
– 支持掉电模式唤醒功能
• PS/2 设备控制器
– 禁止 Host 通信和请求发送检测
– 接收帧错误检测
– 可编程的 1 到 16 字节的发送缓冲以减少CPU的负担
– 数据据接收的双缓冲
– 软件可控总线
• USB 2.0 Full-Speed Device
– 一组12Mbps的USB 2.0 FS 设备
– 片内集成USB收发模块
– 提供1组中断源,提供四个中断事件
支持控制传输(Control),批量传输(Bulk In/Out),中断传输(Interrupt)及同步传输
当总线上无信号达到3ms时,具有自动暂停的功能
– 支持6组可编程端点(endpoints)
– 512 字节内部 SRAM 作为 USB 的缓存区
– 支持远程唤醒功能
• 支持EBI(外部总线接口)(100-pin and 64-pin Package Only)
– 可访问的空间: 8位模式为64KB 或16位模式为128KB
– 支持8-位/16-位数据宽度
– 在16位数据宽度模式下支持字节写入
• ADC
– 12位ADC,转换速率达 700K SPS
– 最多8通道单端模式输入或4通道差分模式输入
– 单一扫描模式/单周期扫描模式/连续扫描模式
– 每个通道有独立的结果寄存器
– 扫描使能通道
– 阈电压侦测
– 软件编程或外部管脚触发开始转换
– 支持 PDMA 模式
• 模拟比较器(Analog Comparator)
– 2组模拟比较器模块
– 负端电位可选择外部输入或内部频带间隙电压
– 比较结果改变可作为中断触发条件
– 支持掉电模式唤醒功能
• 内建温度传感器, 1℃ 分辨率
• 欠压检测(Brown-Out detector)
– 支持四级检测电压:4.5 V/3.8 V/2.7 V/2.2 V
– 支持欠压中断和复位选择
• 低压复位
– 阈电压:2.0 V
• 工作温度:-40℃~85℃
• 封装:
– 无铅封装(RoHS)
LQFP 100-pin / 64-pin / 48-pin
NuMicro™ NUC140 Connectivity Line选型指南
图1.NuMicro™ NUC140 框图
NUC140VE3AN应用:
Industrial Control
Data Communications
USB Applications
Consumer Products
Motor Control
Automotive
NuTiny-SDK-NUC140 uses the NUC140VE3AN as the target microcontroller. Figure 2-1 is NuTiny-SDK-NUC140 for NUC140 series, the left portion is called NuTiny-EVB-NUC140 and the right portion is Debug Adaptor called Nu-Link-Me.
NuTiny-EVB-NUC140 is similar to other development boards. Users can use it to develop and verify applications to emulate the real behavior. The on board chip covers NUC140 series features. The NuTiny-EVB-NUC140 can be a real system controller to design users’ target systems.
Nu-Link-Me is a Debug Adaptor. The Nu-Link-Me Debug Adaptor connects your PC’s USB port to your target system (via Serial Wired Debug Port) and allows you to program and debug embedded programs on the target hardware. To use Nu-Link-Me Debug adaptor with IAR or Keil, please refer to “Nuvoton NuMicro™ IAR ICE driver user manual “or Nuvoton NuMicro™ Keil ICE driver user manual” in detail. These two documents will be stored in the local hard disk when the user installs each driver.
图2.NuTiny-SDK-NUC140外形图
图3.NuTiny-SDK-NUC140电路图(1)
图4.NuTiny-SDK-NUC140电路图(2)
NUC130/140 CAN演示板
A Controller-Area-Network (CAN)-Bus system enables device communication in harsh environments, found in industrial automation, military and automotive applications. As a multi-master system, each device (node) can obtain bus access through its unique priority code (address) and broadcasts messages to all bus participants simultaneously. The Nuvoton NuMicro Family NUC140/NUC130 series chips had offered the robustness of the CAN architecture which is licensed from Bosch.
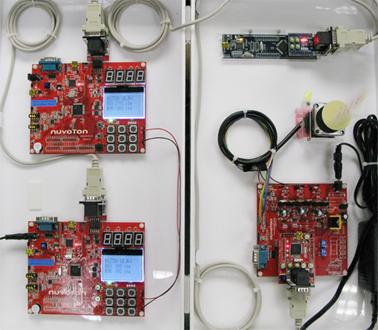
图5. NUC130/140 CAN演示板外形图
NUC130/140 CAN演示板主要特性:
Multi-Master : Every node can control motor speed
Hot plugging
Only two wires to connect CAN BUS
Far distance to transmit: 250m @250Kbps
Good at Anti-EMI
Good at extend system ability
High Reliability : CAN Bus has complete detect error method
NUC130/140 CAN演示板应用:
CAN BUS monitor
Car diagnostic system
Elevator control
Remote monitor about the strain of bridge
Digital Dashboard
Motor Control
This CAN-Bus demonstration kit simulates industrial and automotive control environments.
A System Monitor Node (Node 0 ) This node can be connected to an external PC through a USB interface. The PC/laptop controls the speed rate and shows the real time speed on the screen
A System Monitor Node (Node1) controls the motor speed up/down function
A System Monitor Node (Node2) controls the motor speed up/down function
A Motor Node (Node3) controls speed or start/stop of a stepper motor
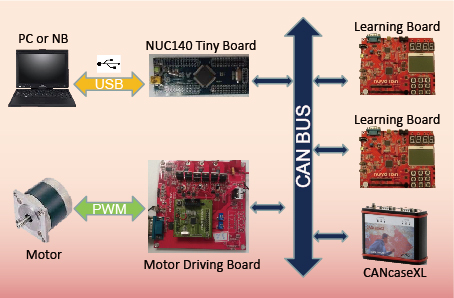
图6.NUC130/140 CAN应用演示图
详情请见:
76660和
http://www.nuvoton.com/NuvotonMOSS/Community/ProductInfo.aspx?tp_GUID=30a48909-12ca-4e73-9422-d8e834638385
来源:网络