DW1000分享资料
2021年12月02日 17:29 发布者:DN1139
近些年来随着物联网和机器人技术的大发展,精确定位技术的热度也随之攀升。目前精确定位的技术有很多,如基于wifi、RFID、zigbee、超声波、UWB等技术都可以实现精准定位。由于技术的不同,精度也不尽相同,造假也不同。本文将讲述基于超宽带技术的定位系统的技术实现框架和流程,由于本文主要参考DECAWAVE公司出品的DW1000芯片相关技术问题,因此对DW1000芯片实现产品化具有推动作用。系统框架 技术DW1000芯片的定位技术主要包括锚站、标签、应用服务器和数据库
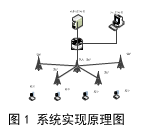 锚站:锚站与标签进行无线通信,接收来自标签的接入请求信息、位置更新POLL信息、位置更新FINAL信息,并对接入信息和POLL信息进行响应。同时将位置更新FINAL信息回传给解算服务器;从锚站与主锚站进行通信进行信息交互; 标签:标签与锚站进行无线通信,发送接入请求信息、位置更新POLL信息、位置更新FIANL信息给锚站,并在FINAL信息中加入标签电量等信息,同时对POLL响应信息进行响应,反馈为位置更新FINAL信息。 应用服务器:该服务器接收来自主锚站的含标签ID的位置更新信息,根据相关参数,如距离、速度等,计算出位置信息,并连同解析的标签电量信息写入数据库。其中电量更新频率可以按设定的周期来更新;同时提供在导入的地图上进行标签跟踪,路径回访等功能。 数据库服务器:该服务器供解算服务器、锚站、标签等数据写入功能。
锚站:锚站与标签进行无线通信,接收来自标签的接入请求信息、位置更新POLL信息、位置更新FINAL信息,并对接入信息和POLL信息进行响应。同时将位置更新FINAL信息回传给解算服务器;从锚站与主锚站进行通信进行信息交互; 标签:标签与锚站进行无线通信,发送接入请求信息、位置更新POLL信息、位置更新FIANL信息给锚站,并在FINAL信息中加入标签电量等信息,同时对POLL响应信息进行响应,反馈为位置更新FINAL信息。 应用服务器:该服务器接收来自主锚站的含标签ID的位置更新信息,根据相关参数,如距离、速度等,计算出位置信息,并连同解析的标签电量信息写入数据库。其中电量更新频率可以按设定的周期来更新;同时提供在导入的地图上进行标签跟踪,路径回访等功能。 数据库服务器:该服务器供解算服务器、锚站、标签等数据写入功能。关键技术TS分配技术:多址技术
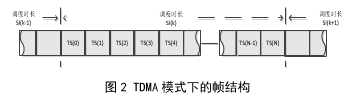
DW1000的芯片提供两种多址方式TDMA和CDMA方式,本文着重分析TDMA模式。TDMA模式下,DW1000支持频分1/2/3/4/5/7共6个通道,但实际操作过程中6个通道由于存在频率干扰,致使不可同时应用。单通道下,根据处理机制不同,可将空口时间片进行切割形成时隙 TS,每个时隙分给一个固定的标签使用,如图所示。如果时隙是共享模式,在标签进入休眠状态,该时隙进行资源释放,可供其他标签使用;若在独享模式下,不论标签是否进入休眠,该时隙也将不分配给其他用户;仅当标签硬件在系统中进行销毁时,时隙资源方可回收。
TOF(time of flight)位置更新流程设计
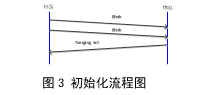
如图3 所示,该原理图中信息交互点较少,主要集中在空口信息交互。本节针对空口交互流程进行分析,包含接入初始化,位置更新等。本文针对decawave厂家未给出异常处理流程,提出了异常处理流程,从而完成系统性的完善和优化。
初始化流程:标签加电后,系统进入锚站搜索流程,发起初始化信息Blink,等待锚站回应,锚站回应Ranging Init息,标签按照Response 消息进行初始配置,如时隙、唤醒周期等。此后,标签进入位置更新流程。
位置更新流程:在该状态下标签已拥有自己专属的通信时隙,以two-way ranging模式为例,位置更新流程为如下。首先标签发起POLL信息给临近的三个锚站,并记录初始时间ti(第i次更新)三个锚站收到POLL信息并在规定的时隙内反馈给标签(记录trelay通常是系统常数),标签收到反馈消息,并记录每个锚站通信的时间差tj(第j个锚站),时间差鱼无线电波传输速率乘积即为标签与锚站的距离。标签将三个距离信息打包回传给主锚站,主锚站回传给后台数据库,解算模块利用距离信息计算出本次标签位置更新信息,并写入数据库,完成位置更新。

标签POLL消息发起的时间为标签时刻Tt0,i,发起的地点为(x,y,z)。当第i个锚站(xi,yi,zi)收到POLL消息为Ta0,i,锚站处理后发送Response信息给标签时刻为Tal,i,标签收到锚站Response信息时刻为Ttl,i。定义Trelay为锚站处理常数:Trelay=Tal,i-Ta0,i。